
Page 114 - 《应用声学)》2023年第5期
P. 114
1006 2023 年 9 月
现了声源方位的有效估计,这对垂直阵的声源定位
0 引言
有着重要意义。
阵不变量方法是一种利用浅海环境中宽带信
号频散效应实现声源定位的方法 [1] 。与波导不变量 1 基本模型
相比,阵不变量方法不用形成声强的干涉结构就可
阵不变量方法是一种不需要前向计算模型且
以实现对声源距离的估计 [2] ,具有实时性和鲁棒性,
具有鲁棒性的被动定位方法。该方法利用平面波波
因此,成为国内外关注的热点。
束形成技术获取波束角度和传播时间上相互分离
阵不变量方法具有实时稳健的优点,但该方法
的多径相干到达,从中提取声源的距离信息,已有
不能直接应用于宽带连续信号声源的定位问题上,
研究中忽略了声源与倾斜阵存在夹角的复杂情况,
宽带连续信号的多径到达混叠在一起,提取出相互
仅针对二维平面内的简单模型研究自校正算法的
分离的波束到达角难度大,无法实现阵不变量的解
性能。现将该问题扩展到三维模型,本节首先介绍
算。盲反卷积技术的提出使阵不变量方法成功应用
三维空间内倾斜阵基于盲反卷积技术的阵不变量
在信号类型未知的声源定位场景中 [3] 。文献 [4] 研
方法。
究了阵列倾斜对该方法定位精度的影响,发现阵列
倾斜会严重影响该方法的定位效果;提出了一种自 1.1 倾斜阵定位模型
校正算法,用来改善二维平面内由阵列倾斜角度引
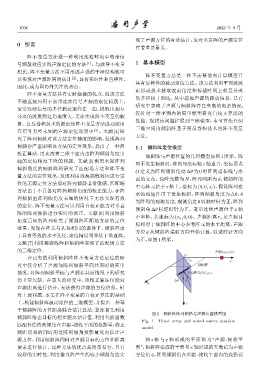
倾斜阵与声源位置的几何模型如图 1 所示。阵
起的定位精度下降的问题。文献 [5] 利用未知阵列
列不发生倾斜时,阵列与坐标轴z 轴重合,坐标原点
倾斜角度的倾斜阵列研究了匹配场方法和阵不变
O 定义为阵列倾斜角度 ∆θ 为 0 时阵列延长线与水
量方法的定位效果,发现利用浅海频散效应进行定
面的交点。设阵元数为 N,阵元间距为 d,倾斜阵的
位的无源定位方法都对阵列倾斜非常敏感,匹配场
中心阵元位于 z 轴上,坐标为 (0, 0, z c ),假设阵列在
方法由于不具备对阵列倾斜角度的校正能力,在阵
水流流速作用下发生倾斜,阵列倾斜角度为 ∆θ,θ
列倾斜且阵列倾角度未知的情况下无法实现有效
为阵列的观测角度,观测角度θ 以顺时针为正,阵列
的定位,阵不变量方法可以利用自校正能力对垂直
倾斜角 ∆θ 以逆时针为正。宽带连续声源位于 x 轴
阵的阵列倾斜进行实时的修正。文献 [6] 利用倾斜
正半轴,其坐标为 (x 0 , 0, 0)。声源距离 r s 是声源目
角度已知的阵列研究了倾斜阵匹配场方法的定位
标相对于倾斜阵的中心参考阵元的水平距离,声源
效果,发现在阵元与孔径相同的条件下,倾斜阵由
方位 ϕ 从倾斜阵端射方向开始计算,以逆时针方向
于具有等效的水平孔径,定位精度明显优于垂直阵。
为正,如图1所示。
文献 [7] 利用螺旋线阵和倾斜阵实现了匹配场方法
的三维定位。 ܦູ↼x ֒֒↽
O
在已有的利用倾斜阵阵不变量方法定位的研
φ x
究中仅分析了声源与阵列倾斜平面共面时的简单 Ϛப
情况,对阵列倾斜平面与声源非共面情况下的研究 ˗ॷЋ↼֒֒z c ↽
仍非常欠缺。在前人的研究中,自校正算法仅能对 Dθ θ
y
声源距离进行估计,无法获得声源的方位信息。针
对上述问题,本文在阵不变量的自校正算法的基础
上,构建倾斜阵被动定位的三维模型,并提出一种基 z
于倾斜阵的方位距离联合估计算法,算法首先利用
图 1 倾斜阵阵列倾角与声源位置模型图
倾斜阵给出目标的初步距离估计值,利用代价函数
Fig. 1 Tilted array and sound source position
匹配补偿阵列倾角在声源-接收平面的投影量,修正
model
测距误差的同时用过阵列倾角投影量反向估计声
源方位,利用倾斜阵同时对声源目标的方位和距离 将 z 轴与 x 轴形成的平面称为 “声源 -接收平
要素进行估计。这种方法的优点是简单易行,具有 面”,倾斜阵张成的平面与x轴形成的夹角记为声源
较好的实时性,利用垂直阵产生的较小倾斜角度实 方位角 ϕ,阵列倾斜角在声源 -接收平面内的投影记