
Page 133 - 《应用声学)》2023年第5期
P. 133
第 42 卷 第 5 期 杨海东: 多波束测深仪姿态对测深影响分析及误差校正技术 1025
的发射阵和接收阵,将实时测量得到的姿态数据反
0 引言
馈至声呐的电路系统,通过电子波束控制保证声波
多波束声呐产生于冷战背景。20 世纪 60 年代, 发射和接收指向为声呐正下方。第一种方法是 “后
第一台多波束声呐由通用公司的哈里斯反潜作战 端”校正,是目前主流做法;第二种方法是“前端” 校
部研制成功,并应用于美国海军绘制深海海图 [1] 。 正,目前处于研发阶段,尚未得到商业化应用。本文
1976 年,第一台商用多波束测深仪 SeaBeam 诞生。 在上述两类主流方法之外,提出了在平坦海底中利
到20 世纪末和 21 世纪初,多波束声呐蓬勃发展,在 用测深数据快速估计主要姿态并进行校正的技术,
多个国家的大量科考船上得到安装和使用,目前在 该技术主要基于下列原理:在平坦海底条件下,测
军用、民用领域都得到了广泛使用 [2] ,其中国外典 底数据的一些数学拟合特征可以较好地反演姿态
型的公司和产品包括 Kongsburg 公司的 Simrad 系 的特性。
列 [3−4] 、Reson公司的Seabat系列和T50-P等 [5] 。
在海洋测绘中,多波束测深仪是目前应用最广 1 多波束工作原理及姿态类型
泛的设备之一,其主要功能是对海底地形进行精确
1.1 多波束工作原理
测绘,在某些特殊场景中,也可以对海底大型物体
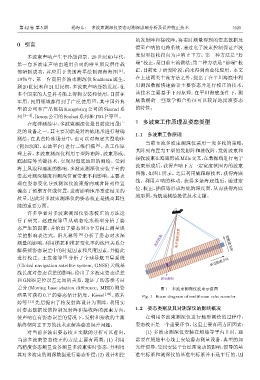
当前主流多波束测深仪采用一发多收的策略,
(例如沉船、石油平台) 进行三维扫描 [6] 。从工作原
其阵列布置为 T 型的发射阵和接收阵,发射波束和
理上看,多波束测深仪利用 T 型阵布阵、波束形成、
接收波束在海底形成Mills交叉,在数据端进行电子
底跟踪等关键技术,实现对海底地形的测绘。受到
波束形成后,获得声呐下方一定宽度范围内的波束
海上风浪和涌流的影响,多波束测深仪安装平台的
图像,如图 1 所示。之后利用底跟踪技术,获得海底
姿态对测深精度和测深位置带来不利影响,主要表
线。利用声呐的移动,获得多条海底线后,通过定
现在姿态变化导致测深仪波束指向或者阵列位置
位、校正、插值等形成海底的深度面,从而获得海底
偏离了预期方位或位置,进而影响地形重建结果的
地形图,为航道测绘提供技术支撑。
质量,因此对多波束测深仪的姿态校正是提高其性
能的重要方面。
许多学者对多波束测深仪姿态校正的方法进
行了研究。赵建虎等 [7] 从动态吃水模型分析了姿
态产生的因素,并给出了姿态对 3 个方向上测量误
差的影响表达式。阳凡林等 [8] 分析了姿态对水深 ႃߕଌஆฉౌ
测量的影响,利用横摇和横摇变化率的线性关系分 ԧ࠱ฉౌ ᓈᤜவՔ
解横摇姿态误差中的时延因素和尺度因素,并据此
进行校正。王发省等 [9] 分析了全球导航卫星系统
(Global navigation satellite system, GNSS)天线基 ۇᄰᓈᤜவՔ
线长度对姿态误差的影响,给出了多波束姿态误差
和 GNSS 定位误差之间的关系,验证了动态参考站 ฉౌᑮӿ
差分 (Moving base station difference, MBD) 测姿 图 1 多波束测深仪波束示意图
结果可获得 0.1° 的姿态估计精度。Kiesel [10] 、陈若 Fig. 1 Beam diagram of multibeam echo sounder
婷等 [11] 先后提出了将发射阵设计为面阵,利用实
时姿态数据反馈控制发射阵和接收阵的波束方向, 1.2 姿态类别及其对测深仪的影响概况
使声呐在有姿态误差的情况下,发射和接收的主瓣 在利用多波束测深仪进行地形测绘的过程中,
始终朝向正下方的技术来解决姿态误差问题。 姿态校正是一个重要环节。这里主要有两方面因素:
对当前多波束姿态校正文献的分析可以看出, (1) 多波束测深仪安装在船舶等平台上时,通
当前多波束姿态校正的方法主要有两类:(1) 利用 常要在船舶中心线上安装姿态测量设备,典型的如
高精度姿态测量设备测量多波束实时姿态,并利用 光纤惯导,受到安装平台经常变动的影响,惯导的基
其对多波束的测深数据进行姿态补偿;(2) 设计相控 准坐标系和测深仪的基准坐标系并不是平行的,因