
Page 135 - 《应用声学)》2023年第5期
P. 135
第 42 卷 第 5 期 杨海东: 多波束测深仪姿态对测深影响分析及误差校正技术 1027
利用傅里叶变换的性质,可以求得平滑窗滤波器的
h 1 = r 1 cos θ,
(5) 频率响应函数为
h 2 = r 2 cos θ.
[ m ( )]
引入俯仰角θ p ,有关系式 H(f)= 1 1 + 2 ∑ cos k · 2π f . (11)
2m+1 k=1 f s
h 1 = h 2 cos θ p . (6)
针对多波束测量中的升沉因素,考虑多波束的数据
定义俯仰校正相对值并计算,有
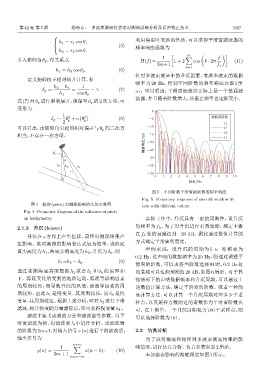
帧率为 20 Hz,绘制不同阶数的频率响应如图 5 所
h 2 − h 1 1
δ p = = − 1. (7) 示。可以看出,平滑窗滤波器实际上是一个低通滤
h 1 cos θ p
波器,并且随着阶数增大,其截止频率也逐渐变小。
式(7) 对θ p 进行泰勒展开,保留至θ p 的2次方项,可
变形为
0
1 2 ( ) ฉ٨
3
δ p = θ + o θ p . (8) -5
p
2 11
可以看出,由俯仰角引起的相对偏差与 θ p 的二次方 -10 21
31
ࣨए־ऄ/dB -20
相当,不存在一次方项。 -15 41
θ p -25
-30
θ
-35
h
h r
r
-40
0 1 2 3 4 5 6 7 8 9 10
ᮠဋ/Hz
图 5 不同阶数平滑窗滤波器的频率响应
Fig. 5 Frequency response of smooth window fil-
图 4 俯仰 (pitch) 对测深影响的几何示意图 ters with different orders
Fig. 4 Geometric diagram of the influence of pitch
on bathymetry 实际工作中,升沉具有一定的周期性,设升沉
的频率为 f h ,为了对升沉进行有效滤除,规定主瓣
2.1.3 升沉(heave)
在 f h 处的衰减达到 −20 dB。据此通过数值计算的
升沉在 z 方向上产生位移,最终对测深结果产
方式确定平滑窗的宽度。
生影响。其对测深的影响表达式较为简单,设海底
举例来说,设升沉的周期为 5 s,即频率为
真实高度为h 1 ,海底实测高度为h 2 ,升沉为δ h ,则
0.2 Hz,设声呐的数据帧率为 20 Hz,则通过调整平
h 1 =h 2 − δ h . (9)
滑窗的阶数,可以求得当阶数选择 91 时,0.2 Hz 处
通过实测海底高度数据 h 2 拟合 h 1 和 δ h 的原理如 的衰减可以达到预期的20 dB,如图6 所示。对于其
下。海底变化所受到的地质运动、海流等影响因素 他情形下的声呐数据帧率和升沉周期,可以通过上
的周期较长,而导致升沉的风浪、涌浪等因素的周 述数值计算方法,确定平滑窗的阶数。或者一种简
期较短,因此 h 1 是慢变量,其周期较长,而 δ h 是快 易计算方法,可以计算一个升沉周期对应多少个采
变量,其周期较短。根据上述分析,可对h 2 进行平滑 样点,以其采样点数附近的奇数作为平滑窗阶数也
滤波,将其快变的分量滤除后,即可获得慢变量h 1 。 可。在上例中,一个升沉周期包含100 个采样点,则
滤波主要考虑滤波方法和滤波窗等参数。以平 可以选择阶数为101。
滑窗滤波为例,对滤波窗大小进行分析。设滤波器
的阶数为2m+1,对输入信号x (n)进行平滑滤波后, 2.2 仿真分析
输出信号为 为了说明横滚和俯仰对多波束测底结果的影
n+m
1 ∑ 响情况,进行仿真分析。仿真参数如表2所示。
y(n) = x(n − k). (10)
2m + 1 未加姿态影响的海底深度如图7所示。
k=n−m