
Page 134 - 《应用声学)》2023年第5期
P. 134
1026 2023 年 9 月
此需要对这两个坐标系之间的变换矩阵进行测量 声呐平台对多波束测深仪的影响因素包括水
并校正,也就是“安装校准”。 平面的定位影响和铅垂线方向的测深影响。根据几
(2) 由于多波束测深仪扫宽大,而其安装平台 何关系不难得到 6 种姿态对位置和测深影响与否的
(通常是水面船舶) 受到风浪和涌流的影响,存在 6 结论,如表1所示。
个自由度 (3 个角度量、3 个位移量) 的实时动态偏 本文仅讨论姿态对测深的影响以及对测深的
差,这对海底各散射脚点的准确估计带来不利影响。 校正,因此仅讨论横滚、俯仰和升沉等3种姿态。
这就需要实时监测多波束测深仪的姿态信息,并补
2 姿态影响分析
偿至其声呐图像中,也就是 “姿态校正”。一般来说,
前者是静态的、固定的,后者是动态的、实时变化的。 2.1 理论分析
多波束测深仪姿态校正通用方式是利用安装在平
2.1.1 横滚(roll)
台上的高精度姿态仪,通过规划校准测线和后处理
横滚对测深影响的几何示意图如图 3 所示,设
完成安装偏差估计,通过实时姿态数据进行动态姿
某个波束的波束入射角为 θ,经检测底的斜距为 r,
态校正。
则该点距离声呐的垂直高度为
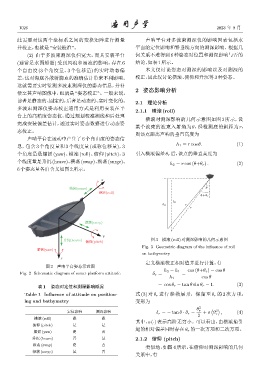
声呐平台在运动中产生了 6 个自由度的姿态信
h 1 = r cos θ. (1)
息,包含 3 个角度量和 3 个线度量 (或称位移量),3
个角度量是艏摇 (yaw)、横滚 (roll)、俯仰 (pitch),3 引入横滚偏差θ r 后,该点的垂直高度为
个线度量是升沉 (heave)、横荡(sway)、纵荡(surge)。
h 2 = r cos (θ+θ r ) . (2)
6个姿态量各自含义如图2所示。
x
ጫᕥ(surge) θ
ഷ໔(roll)
θ+θ r
h
r
h
r
ഷᕥ(sway)
y
Ӥො(heave) 图 3 横滚 (roll) 对测深影响的几何示意图
ο̈́(pitch)
Fig. 3 Geometric diagram of the influence of roll
ᓜ୍(yaw)
on bathymetry
z
定义横滚校正相对值并进行计算,有
图 2 声呐平台姿态示意图
cos (θ+θ r ) − cos θ
h 2 − h 1
Fig. 2 Schematic diagram of sonar platform attitude δ r = =
h 1 cos θ
= cos θ r − tan θ sin θ r − 1. (3)
表 1 姿态对定位和测深影响概况
Table 1 Influence of attitude on position- 式 (3) 对 θ r 进行泰勒展开,保留至 θ r 的 2 次方项,
ing and bathymetry 变形为
θ 2 ( )
定位影响 测深影响 δ r = − tan θ · θ r − r + o θ 3 , (4)
2 r
横滚 (roll) 是 是
其中,o (·) 表示高阶无穷小。可以看出,由横滚角引
俯仰 (pitch) 是 是
起的相对偏差同时存在θ r 的一次方项和二次方项。
艏摇 (yaw) 是 否
升沉 (heave) 否 是 2.1.2 俯仰 (pitch)
横荡 (sway) 是 否
类似地,如图4所示,在俯仰对测深影响的几何
纵荡 (surge) 是 否
关系中,有