
Page 139 - 《应用声学)》2023年第5期
P. 139
第 42 卷 第 5 期 杨海东: 多波束测深仪姿态对测深影响分析及误差校正技术 1031
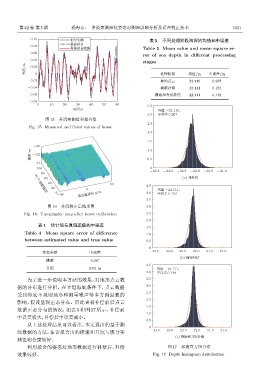
0.10 ਅࠄ 表 5 不同处理阶段海深的均值和中误差
લՌ
0.08
લՌฉ Table 5 Mean value and mean square er-
0.06
ror of sea depth in different processing
0.04
stages
Ӥො/m 0.02 0 处理阶段 均值/m 中误差/m
-0.02 原始点云 22.110 0.207
-0.04 横滚补偿 22.111 0.152
-0.06 横滚和升沉补偿 22.111 0.148
-0.08
0 10 20 30 40 50 60
3.5
ᫎ/s کϙ -22.110,
3.0 ˗ឨࣀ 0.207
图 15 升沉实测值和拟合值
2.5
Fig. 15 Measured and fitted values of heave
2.0
1.5
-20 1.0
๒ງ/m -22
-24 0.5
100 0
-23.5 -23.0 -22.5 -22.0 -21.5 -21.0
80
ᓈᤜՔ x/m 40 20 50 4.5
60 (a) ళᛪϪ
0 0 4.0 کϙ -22.111,
˗ឨࣀ 0.152
-50 ۇᄰᓈᤜՔ y/m
3.5
图 16 升沉校正后地形图 3.0
Fig. 16 Topographic map after heave calibration 2.5
2.0
表 4 估计值与真值差值的中误差
1.5
Table 4 Mean square error of difference 1.0
between estimated value and true value 0.5
0
姿态类型 中误差 -23.5 -23.0 -22.5 -22.0 -21.5 -21.0
(b) ഷ໔ᛪϪ
横滚 0.06°
4.5
升沉 0.02 m کϙ -22.111,
4.0 ˗ឨࣀ 0.148
为了进一步说明本方法的效果,对地形点云数 3.5
据的分布进行分析。在平坦海底条件下,点云数据 3.0
2.5
受到海底不规则地形和测量噪声等多方面因素的
2.0
影响,假设呈现正态分布。因此查看补偿前后点云
1.5
数据正态分布的情况,如表 5 和图 17 所示,补偿前
1.0
中误差较大,补偿后中误差减小。
0.5
从上述处理结果可以看出,本文提出的基于测
0
深数据的方法,估计拟合出的横滚和升沉与惯导实 -23.5 -23.0 -22.5 -22.0 -21.5 -21.0
(c) ഷ໔֗ӤොᛪϪ
测值吻合度较好。
利用拟合的姿态对地形数据进行补偿后,补偿 图 17 深度直方图分布
效果较好。 Fig. 17 Depth histogram distribution