
Page 17 - 《应用声学》2023年第6期
P. 17
第 42 卷 第 6 期 金士杰等: 微流控芯片流道特征超声 C 扫描分析 1127
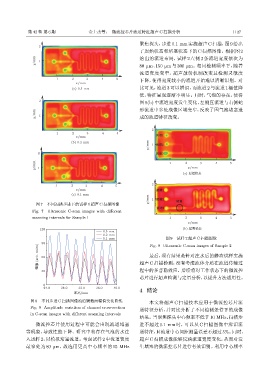
聚焦探头,步进 0.1 mm 实施超声 C 扫描,图 9 给出
2
了原始状态和堵塞状态下的 C 扫描图像。根据图 2
y/mm 1 给出的流道布局,试样 2 左侧 3 条流道宽度依次为
80 µm、150 µm 与 300 µm。相同检测频率下,随着
流道宽度变窄,超声散射机制改变且检测灵敏度
1 2 3 4 5 下降,使得宽度较小的流道开始难以清晰识别。对
x/mm
(a) 0.5 mm 比可见,流道 3 可以辨识,而流道 2 与流道 1 幅值降
低,特征呈现逐渐不明显。同时,气泡的存在,使得
2
图 9(b) 中流道宽度发生变化,左侧直流道与右侧蛇
y/mm 1 形流道中多处成像区域变窄,反映了因气泡堵塞造
成的流道特征改变。
2
1 2 3 4 5
x/mm
y/mm 1
(b) 0.2 mm
2
y/mm 1 1 2 x/mm 3 4 5
(a) Ԕݽ࿄গ
2
1 2 3 4 5
x/mm
(c) 0.1 mm
y/mm 1
图 7 不同扫描步进下的试样 1 超声 C 扫描图像
Fig. 7 Ultrasonic C-scan images with different
scanning intervals for Sample 1 1 2 3 4 5
x/mm
120 (b) ܄܋࿄গ
0.5 mm
0.2 mm
0.1 mm 图 9 试样 2 超声 C 扫描图像
90 Fig. 9 Ultrasonic C-scan images of Sample 2
ࣨϙ (arb. units) 60 超声 C 扫描检测,没有考虑流体介质在流道传输过
最后,现有结果是针对注水后的静态试样实施
30 程中的多普勒效应。后续将对工作状态下的微流控
芯片进行超声检测与定量分析,以提升方法适用性。
0
24.0 28.0 32.0 36.0 40.0 4 结论
ᡰሏ/mm
图 8 不同步进 C 扫描图像流道横截面幅值变化曲线
本文将超声 C 扫描技术应用于微流控芯片流
Fig. 8 Amplitude variation of channel cross-section
道特征分析,并对比分析了不同检测条件下的成像
in C-scan images with different scanning intervals
结果。当聚焦探头中心频率不低于10 MHz、扫描步
微流控芯片使用过程中可能会出现流道堵塞 进不超过 0.1 mm 时,可以从 C 扫描图像中辨识流
等现象,导致性能下降。研究中将存在气泡的水注 道特征,且流道中心间距测量误差不超过5%。同时,
入试样 2,以模拟堵塞流道。考虑试样 2 中流道宽度 超声 C 扫描成像能够反映流道宽度变化,从而对发
最窄处为 80 µm,故选用更高中心频率的 15 MHz 生堵塞的微流控芯片进行有效识别。利用中心频率