
Page 184 - 《应用声学》2023年第6期
P. 184
1294 2023 年 11 月
1.8
1.7
125
1.6
1.5 120
፥ ᮠဋ/Hz
1.4
1.3 115
ܳҿ
1.2
ܳҿ
110
1.1 5 10 15 20 25
-50-40-30-20-10 0 10 20 30 40 50
η٪උ/dB ᫎ/s
(a) Sevcik፥ፇ౧ (a) ଌஆηՂLOFARڏ
350 1.35
300
250
1.30
200
྅ Sevcik፥
150
100 ܳҿ 1.25
ܳҿ X. ⊲
50
Y .⊲
0
-50-40-30-20-10 0 10 20 30 40 50 1.20
0 5 10 15
η٪උ/dB
ᤴए/(mSs -1 )
(b) ྅ϙፇ౧
(b) ᤴएଽጊፇ౧
80 1.0
Sevcik፥
྅ 0.8
60
ᄱࠫԫӑ/% 40 ॆʷӑϙ 0.6
0.4
20 ྅
0.2
Sevcik፥
0 0
-50-40-30-20-10 0 10 20 30 40 50 0 5 10 15
η٪උ/dB ᤴए/(mSs -1 )
(c) ܳҿ௧աߛښːመ͉̽Ѧᄱࠫԫӑϙ (c) ːመଽጊፇ౧ࠫඋ
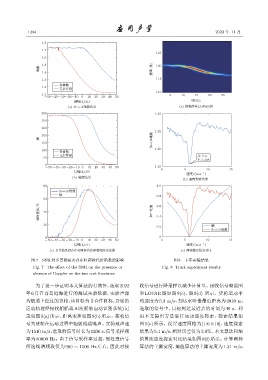
图 7 SNR 对多普勒是否存在时两种代价函数的影响 图 8 卡车实验结果
Fig. 7 The effect of the SNR on the presence or Fig. 8 Truck experiment results
absence of Doppler on the two cost functions
为了进一步证明本文算法的有效性,选取 2022 收信号进行降采样以减少计算量。接收信号频谱图
年 6 月在青岛近海进行的海试实验数据,实验声源 和 LOFAR 图如图 9(c)、图 9(d) 所示。货轮运动平
为航道上经过的货轮,该目标为非合作目标,货轮的 均速度为 5.3 m/s,到达水听器最近距离为 2010 m,
运动轨迹经接收船船载 AIS(船舶自动识别系统) 记 选取的信号中,目标到达最近点的时间为 49 s。利
录如图 9(a) 所示,距离变换如图 9(b) 所示。接收信 用本文提出方法进行运动速度搜索,搜索结果如
号为货轮在运动过程中辐射线谱噪声。实验地声速 图 9(e) 所示。设置速度网格为 [1:0.1:10],速度搜索
为1510 m/s,选取的信号时长为1200 s,信号采样频 结果为5.1 m/s,相对误差仅为3.8%。本文算法和熵
率为 80000 Hz。由于信号采样率过高,而处理信号 值算法速度搜索对比结果如图 9(f) 所示。计算两种
所选线谱频段仅为 980 ∼ 1000 Hz 左右,因此对接 算法的主瓣宽度,熵值算法的主瓣宽度为1.31 m/s,