
Page 50 - 《应用声学》2024年第6期
P. 50
1226 2024 年 11 月
组合式声屏障子结构高度的多目标优化问题,该算 表示,其中 i 表示位于 Pareto 前沿上的每个点,j 代
法是目前应用最广泛的多目标优化算法之一。 表目标空间的维数。因此,无量纲化的目标矩阵
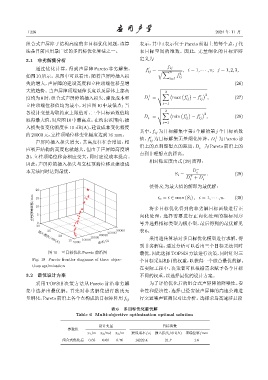
3.1 非劣解集分析 定义为
通过优化计算,得到声屏障 Pareto 非劣解集, ′ f ij
ij ∑ n
f = √ , i = 1, · · · , n; j = 1, 2, 3,
2
如图 10所示。从图中可以看出,随着声屏障插入损 f ij
i=1
失的增大,声屏障的建设高度和立柱顶端位移呈增 (26)
大的趋势。当声屏障顶端延伸长度以及屏体上部高 v 3
u
+ u∑ ( ( ′ ) ′ ) 2
度均为 0时,组合式声屏障的插入损失、建设成本和 D = t max f ij − f ij , (27)
i
立柱顶端位移值均为最小,对应图 10 中最低点;当 j=1
v
各设计变量均取约束上限值时,三个目标函数值均 u 3 ( ) ) 2
u∑ (
′
−
′
D = t min f ij − f ij , (28)
i
取得最大值,对应图10中最高点。在约束范围内,插
j=1
入损失值变化幅度在 10 dB(A)、建设成本变化幅度
其中,f ij 为目标解集中第 i 个解的第 j 个目标函数
约20000元、立柱顶端位移变化幅度达到16 mm。
+
值,f 为目标解集无量纲化矩阵,D 为 Pareto 前
′
声屏障插入损失增大,其高度往往会增加,相 ij i
沿上的点到理想点的距离,D − 为 Pareto 前沿上的
应吸声结构的高度也就越大,但由于声屏障高度增 i
点到非理想点的距离。
加,立柱顶端位移会相应变大,同时建设成本提高。
相对贴近度由式(29)而得:
因此,声屏障的插入损失与立柱顶端位移及建设成
本无法同时达到最优。 D −
i
S i = + . (29)
D + D −
i i
使得S i 为最大值的解即为最优解:
20 i o = i ∈ max (S i ) , i = 1, · · · , n. (30)
ቡಏᮇቫͯረ/mm 10 向化处理,选择需要进行正向化处理的指标列序
15
将多目标优化得到的非劣解目标函数进行正
5
0 号并选择指标类型为极小型,最后得到的最优解见
30
25 30000 表 6。
25000
20 15000 20000 采用遗传算法对多目标优化模型进行求解,得
15 10000
5000 ੇవ/Ћ
ଣК૯ܿ/dB(A)
到非劣解集,通过分析可以看出三个目标无法同时
图 10 三目标优化 Pareto 前沿图 最优,因此选择TOPSIS方法进行决策,同时针对三
Fig. 10 Pareto frontier diagrams of three objec- 个目标采用相同的权重,以获得一个综合最优的解。
tives optimization
在实际工程中,决策者可以根据需求赋予各个目标
3.2 最优设计方案 不同的权重,以选择最优的设计方案。
采用 TOPSIS 决策方法从 Pareto 前沿非劣解 为了评价优化后的组合式声屏障的降噪性、安
集中选择出最优解。首先对非劣解集进行欧氏无 全性和经济性,选择已经安装声屏障的高速公路进
行交通噪声监测以对比分析。选择荣乌高速涉县段
量纲化,Pareto前沿上各个点构成的目标矩阵用 f ij
表 6 多目标优化最优解
Table 6 Multi-objective optimization optimal solution
设计变量 目标函数
参数值
x 1 /m x 2 /rad x 3 /m 建设成本/元 插入损失/dB(A) 顶端位移/mm
组合式优化后 0.63 0.60 0.76 14222.4 21.7 1.6