
Page 31 - 《应用声学》2025年第1期
P. 31
第 44 卷 第 1 期 张楠等: 检测声学成像原理与技术综述 27
机械扫查式线阵三维成像技术的原理简单、硬 证成像精度的条件下大幅降低数据的存储和计算
件复杂度低,且能以较低的成本达到较高的成像质 量 [100] 。另一种方法是改进阵元的数量和分布形式,
量,可以看成是前文所述的一系列二维成像方法在 在有效孔径基本不变的条件下,通过结合粒子群算
三维空间中的进一步延伸和拓展。然而,该技术同 法、遗传算法或模拟退火算法等最优化方法,实现
时也存在一些缺点 [5] :一方面,机械式扫描通常依 阵列的稀疏优化,确保其在近场和远场都具有较好
赖于额外的扫描支架以确定测点的位置或角度,不 的脉冲回波响应 [27] 。
仅范围和速率受限,且其移动步长和稳定性还会影
y
响阵列垂直方向上的空间采样精度;另一方面,相控 x
阵扫描时仅在阵列沿线方向上具有声束的偏转和
聚焦能力。
̄፥ࣱ᭧
为了提升方法成像的实时性,可以考虑从检测
方式、成像原理和数据处理过程等方面加快每一测
点位置处的 B 扫图像生成速度。例如,选择快速傅
里叶变换、Chirp Zeta 变换等典型频域波束形成方 y
法 [94] 进行成像,相比时域方法能够降低对信号的 xx
采样率的需求,从而缩减数据的存储和计算量 [95] 。
ʼ፥
此外,通过与前文所述的基于相干复合平面波或发 ቇᫎ
散波的 TFM 相结合,形成三维超快超声成像技术,
同样能达到高帧率成像的效果 [96] 。
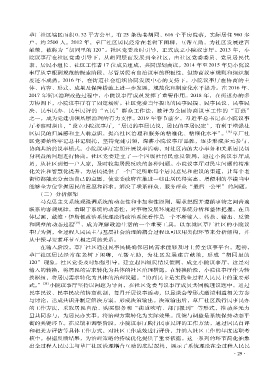
3.2 二维平面阵列三维成像 图 15 一维线型阵列与二维平面阵列
在线阵三维成像的基础上,若通过增加垂直方 Fig. 15 A one-dimensional linear array and a two-
dimensional planar array
向上的传感器阵列对辅助扫查的机械结构进行替
代,则可形成一个二维平面阵列 (如图 15 所示)。相 3.3 二维RCA阵列三维成像
比一维线阵,基于二维阵列的相控阵能够在不移动 作为一种特殊形式的二维稀疏阵列,行列寻址
探头的情况下沿着阵列的两个维度进行任意的波 (Row-column addressing, RCA)阵列由两组相互垂
束聚焦和偏转,因此其三维成像过程也无需额外的 直的、长条形阵元组成的一维阵列堆叠而成 [101] ,
定位校准和坐标转换 [97] 。检测时,通常需提前确定 能够将阵元数量由二维方阵的 N 大幅削减至 2N。
2
横向和侧向两个维度上的波束偏转角度以及相应 图 16给出了 RCA阵列探头的结构和外观。检测时,
的角度步进值,计算扫描线条数,并按照一定的扫查 可以采用两组阵列一组发射、另一组接收的方式,分
路径实现对目标区域的探测。 别实现发射聚焦与接收聚焦,从而获取目标检测区
二维平面阵列三维成像具有检测速度快、操作 域的三维成像结果 [102] 。此外,也可结合合成孔径
灵活性强、成像分辨率高等优点,适合用于实时成 成像 [103] 、医学多普勒成像 [104] 等技术进行应用。
像。通常采用会增加孔径尺寸的方式,以提升成像 RCA 阵列能够极大地降低硬件系统和电子控
的分辨率。目前一些研究中采用的二维阵列维度可 制系统的复杂度和制造成本。这不仅可以减少数
达32×35,可与上千个独立通道进行连接,实现声波 据的采集、计算和存储量,还使得制造一些大孔径
的同时激发 [98] 。然而,这不仅会增加系统的阵元数 的二维阵列成为了可能。相比阵元稀疏分布的二
量、提升电子系统等硬件的复杂度,还会导致实际检 维阵列,RCA 阵列由于具有更大的活性层 (Active
测时存在数据采集、存储和计算量偏大的问题 [99] 。 layer) 面积和适合发射平面波的几何形状,因此在
针对上述问题,除优化波束形成方法、与超快 实现超快超声成像方面同样具有较大的优势 [105] 。
超声成像相结合以外,还可以从阵列的角度进行优 尽管阵列的长条形阵元会产生显著的栅瓣效应,导
化。一种方法是分区域并行的思想,通过将阵列拆 致成像结果中容易出现伪像,但可通过沿阵元长度
分为多个子阵,并采用并行计算的架构,可以在保 方向进行变迹 (Apodization) 实现对伪像的有效抑