
Page 169 - 《应用声学》2025年第2期
P. 169
第 44 卷 第 2 期 明超等: 结合有限新息率重构的水声宽带信号方位估计方法 429
0 100 0
ISSM
RSS
MD-SBL 80
-5 BF-FRI -5
ॆʷӑᑟ᧚/dB -10 ࣝ 60 -10
ᄾࠄவͯ
40
-15 -15
20
-20 0 -20
20 30 40 50 60 70 80 0 60 120 180
வͯᝈ/(°) வͯᝈ/(°)
(a) SNR˞20 dB (a) ISSMவข
0 0
ISSM 100
RSS
MD-SBL
-5 BF-FRI 80 -5
ॆʷӑᑟ᧚/dB -10 ࣝ 60 -10
ᄾࠄவͯ
-15 40
-15
20
-20
20 30 40 50 60 70 80 0 -20
0 60 120 180
வͯᝈ/(°) வͯᝈ/(°)
(b) SNR˞10 dB (b) RSSவข
0 100 0
80
-5 -5
ॆʷӑᑟ᧚/dB -10 ISSM ࣝ 60 -10
RSS
BF-FRI
-15 MD-SBL 40
ᄾࠄவͯ 20 -15
-20
20 30 40 50 60 70 80 0 -20
0 60 120 180
வͯᝈ/(°)
வͯᝈ/(°)
(c) SNR˞0 dB (c) MD¹SBLவข
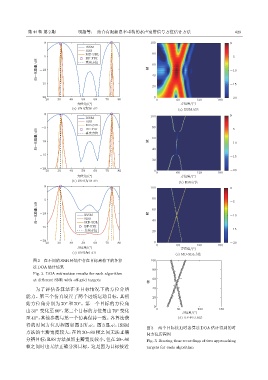
图 2 在不同的 SNR 环境中存在目标离格下的各算 100
法 DOA 估计结果
80
Fig. 2 DOA estimation results for each algorithm
at different SNR with off-grid targets 60
ࣝ
为了评估各算法在多目标情况下的方位分辨 40
能力。第三个仿真设置了两个远场运动目标,其初 20
始方位角分别为 30 和 70 。第一个目标的方位角
◦
◦
0
由30 变化至 80 ,第二个目标的方位角由 70 变化 0 60 வͯᝈ/(°) 120 180
◦
◦
◦
至40 ,其他参数与第一个仿真保持一致。各算法获 (d) BF-FRIவข
◦
得的时间方位历程图如图 3 所示。图 3 显示,ISSM
图 3 两个目标接近时各算法 DOA 估计得到的时
方法的主瓣宽度较大,在约 20∼80 帧之间无法正确 间方位历程图
分辨目标;RSS方法虽然主瓣宽度较小,但在 20∼80 Fig. 3 Bearing time recordings of two approaching
帧之间时也无法正确分辨目标,这是因为目标接近 targets for each algorithm