
Page 195 - 《应用声学》2025年第2期
P. 195
第 44 卷 第 2 期 易兵等: 声学图像的水下小目标三维形状恢复 455
然而,在上述研究方法中,其重构过程主要使
0 引言 用三维恢复算法直接对原始声图进行处理,从而反
演图像的高度信息,该方法在图像的细节信息上或
由于海水的吸收作用,电磁波在水中的传播距
抑制背景噪声上存在不足,使得目标的恢复精度较
离较近,而声波在水中的衰减速度较慢,传播距离
低。为此,本文提出了一种数据融合的三维重构方
较远,因此以声波为媒介的声学传感器是水下作业
法。该方法通过分区域融合不同算法的恢复结果,
时的首选方式设备,其中侧扫声呐(Side scan sonar,
能够有效保留目标区域的细节信息且降低背景区
SSS)是最常用的设备之一 [1−2] 。SSS是一种主要用
域噪声对反演结果的影响,提升目标反演精度,使其
于获取海底地貌和水下目标图像的声学设备,因其
更逼近于真实情况。
性价比高,具有高精度、高分辨率等优点被广泛应
用在海底探测、沉船打捞以及水下搜救等工作中 [3] , 1 背景
但受其工作机理的影响,无法直接获取目标的高度
SSS 是最常用的图像声呐设备之一,可以提供
信息。SSS 图像的视觉分析表明,可通过建立目标
目标和海底的纹理信息,但由于声呐俯仰角的缺失,
像素点强度与对应海底表面坡度之间的映射关系,
使其无法直接获取深度信息。而SSS 中损失的俯仰
来估算目标的高度信息 [4] 。
角信息和入射波方向向量与表面法向量的夹角有
由图像的明暗信息来恢复目标形状 (Shape
关。对于理想的漫反射表面,物体表面的声波强度
from shading, SFS) 是计算机视觉领中三维测量技
遵循 Lambert 余弦定律,即理想漫反射表面的声波
术的关键方法之一,最早是由 Horn [5] 提出,利用像
强度与入射波的方向与表面法向量之间的夹角的
素点的明暗强度变化反演目标形状 [6] 。经过几十年
余弦成正比,由此建立了回波强度与表面法向量之
的发展,以 SFS 为基础,相继出现了最小化法、线
间的关系即回波强度与高度的关系。因此建立适当
性法、演化法、局部最优法等,并在声呐图像处理
的入射强度、反射强度与表面法向量之间的关系既
中得到广泛应用。(1) 最小化法将各种约束条件下
反射方程,则可恢复图像中丢失的高度信息。
的能量函数转换成泛函极值问题或最优化问题来
求解图像的三维高度。如:Coiras 等 [1] 在 Lambert 1.1 反射图方程
反射模型基础上采用能量最小化法进行侧扫图像 传统的 Lambert 反射模型是基于理想漫反射
三维重建,刘浩林等 [7] 提出了一种基于小波变换的 条件下的假设模型,与实际情况存在较大差异。为
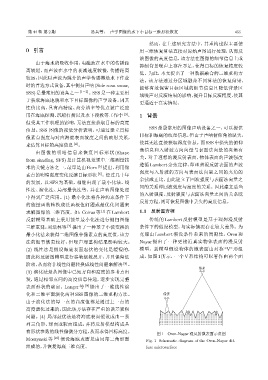
最小化法来获得二维图像中像素点的高度值,该方 克服由 Lambert 假设条件带来的局限性,Oren 和
法的细节恢复较好,但噪声对重构结果影响较大。 Nayar 提出了一种更接近真实物体表面的漫反射
(2) 线性法是假设海底表面起伏的变化是缓慢的, 模型。新模型假设物体的微表面由对称 “V” 形组
因此将反射图模型进行泰勒级数展开,并只保留低 成,如图 1 所示,一个 V 形结构可以看作由两个面
阶项,从而将非线性问题转换成线性问题来解决 [8] 。
ϸጉ
(3) 演化法是从图像中已知方向和高度的参考点出
发,通过相邻点间的高度信息传递,逐步实现完整
表面形状的确定。Langer 等 [9] 提出了一维线性演
化和二维平面演化两种 SSS 图像的三维重构方法。 ϸጉ
由于演化法的每一点的高度值都是通过上一点的
高度演化过来的,因此该方法存在严重的误差累积
问题。(4) 局部最优法是将海底表面假设成由一系
列三角形、球面或鞍面组成,并将反射模型构成具
有形状参数的线性偏微分方程,从而求得目标高度。
图 1 Oren-Nayar 漫反射微表面示意图
Moszynski 等 [10] 假设海底表面是由局部三角形面 Fig. 1 Schematic diagram of the Oren-Nayar dif-
组成的,并恢复海底三维高度。 fuse microsurface