
Page 206 - 《应用声学》2025年第2期
P. 206
466 2025 年 3 月
ࠀѺݽᝈए 其中,T = 20 C,为海水温度;S = 0.0035,为海
◦
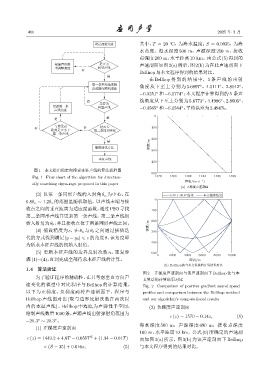
水盐度。海水深度 500 m,声源深度 250 m,接收
点深度 200 m,水平距离 10 km。由公式 (5) 得到的
ಪܦጳዝ ௧ա˞ 声速剖面如图 2(a) 所示,图 2(b) 为在此声速剖面下
یូடᝈए Տیܦጳ
ա
Bellhop与本文程序得到的结果对比。
௧
在 Bellhop 得到的结果中,5 条声线的出射
ኄʷܦጳᝈएᬄ 角度从下至上分别为 5.6897 、4.5111 、2.8042 、
◦
◦
◦
ᤃᔵڊЯᬤԩϙ
−0.3251 和−6.1774 ;本文程序计算得到的 5 条声
◦
◦
◦
◦
◦
ա 线角度从下至上分别为 5.6773 、4.4986 、2.8605 、
௧ա˞
ఞழኄʷ Տیܦጳ −0.3565 和−6.1584 ,平均误差为2.494%。
◦
◦
ܦጳᝈए
0
௧ ௧
ˁଌԪག ௧ա˞
ա ա 100
ᡰሏ௧ա࠵̆ ኄ̄Տیܦጳ
ኄʷܦጳ
200
௧
ଣϙᤖ̽வข ງए/m
300
వढ़ܦጳ
400
图 1 本文提出的定向搜索本征声线的算法流程图
500
Fig. 1 Flow chart of the algorithm for direction- 1478 1480 1482 1484 1486 1488
ܦᤴ/(mSs -1 )
ally searching eigen-rays proposed in this paper
(a) एܦᤴҖ᭧
(3) 以第一条同形声线的入射角 θ a 为中心,在 BELLHOPፇ౧ వሮऀፇ౧
0.8θ a ∼ 1.2θ a 的范围里随机取值。以声线末端与接 0
收点之间的垂直距离为适应度函数,通过PSO寻找 100
第二条同形声线并更新第一条声线。第二条声线初
始入射角为θ b ,并且接收点位于两条同形声线之间。 ງए/m 200
(4) 假设精度为 ε,在 θ a 与 θ b 之间通过插值迭 300
代的方式找到满足 |y − y 0 | 6 ε 的角度 θ,该角度即
400
为所求本征声线的初始入射角。
(5) 更新本征声线的边界反射次数 n,重复步 500
0 2000 4000 6000 8000 10000
骤 (1)∼(4),直到完成全部待求本征声线的计算。 ᡰሏ/m
(b) Bellhopขˁవካขᄊᝠካፇ౧ࠫඋ
1.4 算法验证
图 2 正梯度声速剖面与该声速剖面下 Bellhop 法与本
为了验证程序的精确性,在只考虑垂直方向声 文算法的计算结果对比
速变化的模型中对比程序与 Bellhop 的计算结果。 Fig. 2 Comparison of positive gradient sound speed
以下为正梯度、负梯度两种声速剖面下,程序与 profiles and comparison between the Bellhop method
Bellhop 声线图对比 (取与边界反射次数在两次以 and our algorithm’s computational results
内的本征声线)。Bellhop 中海底为声弹性半空间, (2) 负梯度声速剖面
绘制声线数量1000条,声源声线出射掠射角范围为
c (z) = 1570 − 0.14z, (6)
−20.3 ∼ 20.3 。
◦
◦
海水深度 500 m,声源深度 490 m,接收点深度
(1) 正梯度声速剖面
100 m,水平距离 10 km。公式 (6) 所确定的声速剖
2
c (z) = 1449.2 + 4.6T − 0.055T + (1.34 − 0.01T) 面如图 3(a) 所示,图 3(b) 为该声速剖面下 Bellhop
× (S − 35) + 0.016z, (5) 与本文程序得到的结果对比。