
Page 157 - 《应用声学》2025年第3期
P. 157
第 44 卷 第 3 期 王仪等: 强舰船干扰条件下的无人水下航行器目标特征稳健提取方法 691
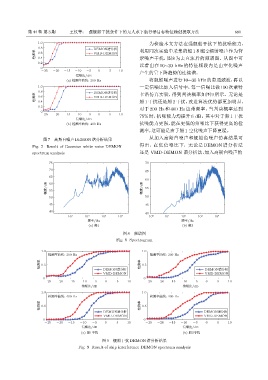
1.0 为检验本文方法在强舰船干扰下的抗噪能力,
0.8 DEMON៨Ѭౢ 利用同次实验中采集的船 1 和船 2 辐射噪声作为背
ೝဋ 0.6 VMD-DEMON 景噪声干扰,图 8 为去直流后的频谱图。从图中可
0.4
0.2
以看出在 10∼30 kHz 的特征频段内是由空化噪声
0
-25 -20 -15 -10 -5 0 5 10 产生的呈下降趋势的连续谱。
η٪උ/dB
(a) ೝဋజጳ: 200 Hz 将舰船噪声进行 10∼30 kHz 的带通滤波,再以
1.0 一定信噪比加入信号中,每一信噪比做 100 次蒙特
0.8 DEMON៨Ѭౢ 卡洛仿真实验,得到判决概率如图 9 所示。无论是
ೝဋ 0.6 VMD-DEMON 船 1 干扰还是船 2 干扰,改进算法优势都更加明显,
0.4
0.2
对于 200 Hz 和 400 Hz 边带频率,当判决概率达到
0
-25 -20 -15 -10 -5 0 5 10
75% 时,抗噪能力均提升 6 dB。其中对于船 1 干扰
η٪උ/dB
(b) ೝဋజጳ: 400 Hz 抗噪能力更强,能在更低的信噪比下获得更高的检
测率,这可能是由于船1 空化噪声下降更缓。
图 7 高斯白噪声 DEMON 谱分析结果 从加入高斯白噪声和舰船色噪声仿真结果可
Fig. 7 Result of Gaussian white noise DEMON 得出,在低信噪比下,无论是 DEMON 谱分析法
spectrum analysis 还是 VMD-DEMON 谱分析法,加入高斯白噪声的
75 70
70
65
65
60
60
ࣨए/dB 55 ࣨए/dB 55
50 50
45 45
40
40
10 1 10 2 10 3 10 4 10 0 10 1 10 2 10 3 10 4
ᮠဋ/Hz ᮠဋ/Hz
(a) ᓕ1 (b) ᓕ2
图 8 频谱图
Fig. 8 Spectrogram
1.0 1.0
ೝဋజጳ: 200 Hz ೝဋజጳ: 200 Hz
ೝဋ 0.5 ೝဋ 0.5
DEMON៨Ѭౢ
VMD-DEMON DEMON៨Ѭౢ
VMD-DEMON
0 0
-25 -20 -15 -10 -5 0 5 10 -25 -20 -15 -10 -5 0 5 10
η٪උ/dB η٪උ/dB
1.0 1.0
ೝဋజጳ: 400 Hz ೝဋజጳ: 400 Hz
ೝဋ 0.5 ೝဋ 0.5
DEMON៨Ѭౢ DEMON៨Ѭౢ
VMD-DEMON VMD-DEMON
0 0
-25 -20 -15 -10 -5 0 5 10 -25 -20 -15 -10 -5 0 5 10
η٪උ/dB η٪උ/dB
(a) ᓕ1ࣰ (b) ᓕ2ࣰ
图 9 舰船干扰 DEMON 谱分析结果
Fig. 9 Result of ship interference DEMON spectrum analysis