
Page 49 - 《应用声学》2025年第3期
P. 49
第 44 卷 第 3 期 沈海平等: 凸组合的变电站噪声有源控制算法 583
ˆ
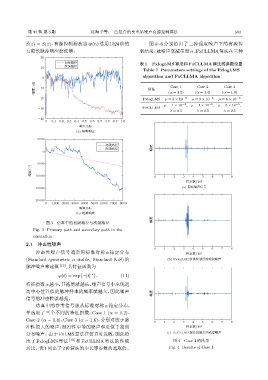
S(z) = S(z),有源控制滤波器 w(n) 选用 1024 阶的 图 4∼6 分别给出了三种强度噪声下的有源控
有限长脉冲响应滤波器。 制结果。就噪声衰减量而言,FxCLLMA算法在三种
20
Ѻጟय़ 表 1 FxlogLMS 算法和 FxCLLMA 算法的参数设置
ጟय़
10
Table 1 Parameters settings of the FxlogLMS
algorithm and FxCLLMA algorithm
0
ࣨए/dB -10 算法 (α = 1.2) (α = 1.4) (α = 1.6)
Case 2
Case 3
Case 1
-20 FxlogLMS µ = 2 × 10 −5 µ = 3 × 10 −5 µ = 6 × 10 −5
µ = 1 × 10 −6 , µ = 1 × 10 −5 , µ = 5 × 10 −5 ,
-30 FxCLLMA
λ = 0.5 λ = 0.5 λ = 0.5
-40
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
ᮠဋ/Hz
(a) ࣨᮠ־ऄ
5000
Ѻጟय़
ጟय़ ࣨए
0
-5000
ᄱͯ/(O) -10000 0 1 2 3 4 5 6 7 8
ನవ/10 4
-15000 (a) Ԕݽ٪ܦηՂ
-20000
0 1000 2000 3000 4000 5000 6000 7000 8000
ᮠဋ/Hz
(b) ᄱᮠ־ऄ
ࣨए
图 3 仿真中的初级路径与次级路径
Fig. 3 Primary path and secondary path in the
simulation
2.1 冲击性噪声
0 1 2 3 4 5 6 7 8
冲击性噪声信号通常用标准对称 α 稳定分布 ನవ/10 4
(Standard symmetric α stable, Standard SαS) 的 (b) FxlogLMSካข҄Ցᄊ൵႑٪ܦ
脉冲噪声来建模 [12] ,其特征函数为
α
φ(t) = exp{−|t| }. (11)
特征指数α 越小,其拖尾就越长,噪声信号中出现远
离中心位置值的脉冲样本的概率就越大,因此噪声 ࣨए
信号的冲击性就越强。
仿真中的参考信号服从标准对称 α 稳定分布,
并选取了三个不同的特征指数:Case 1 (α = 1.2)、
Case 2 (α = 1.4)、Case 3 (α = 1.6),分别对应于脉
0 1 2 3 4 5 6 7 8
冲性很大的噪声、脉冲性中等的噪声和近似于高斯 ನవ/10 4
分布噪声。由于FxLMS算法在仿真时发散,因此给 (c) FxCLLMAካข҄Ցᄊ൵႑٪ܦ
出了 FxlogLMS 算法 [13] 和 FxCLLMA 算法的性能 图 4 Case 1 的结果
对比。表1列出了2种算法的步长等参数的选取值。 Fig. 4 Results of Case 1