
Page 86 - 201805
P. 86
668 2018 年 9 月
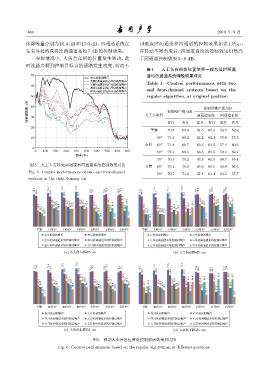
体降噪量分别为16.4 dB和17.0 dB。四通道系统在 同角度时两通道和四通道的控制效果如表 1 所示。
左右耳处均获得比两通道高约7 dB的控制效果。 在转动不同角度后,四通道系统的控制效果仍然高
实际情况中,人头会在初始位置发生转动,此 于两通道控制效果3∼8 dB。
时次级声源到控制目标点的通路发生改变,转动不
表 1 人工头在初始位置使用一般方法时两通
70 道与四通道系统降噪效果对比
Կܫరమ٪ܦ
ࠄ2ᤰ᥋ጇፒԿܫ൵႑٪ܦ
ࠄ4ᤰ᥋ጇፒԿܫ൵႑٪ܦ Table 1 Control performances with two
60
ေ2ᤰ᥋ጇፒԿܫ൵႑٪ܦ
ေ4ᤰ᥋ጇፒԿܫ൵႑٪ܦ and four-channel systems based on the
50 regular algorithm, at original position
Ҫဋ៨ࠛए/dB 40 人工头姿势 初始噪声级/dB 两通道系统 四通道系统
控制后噪声级/dB
30
20 左耳 右耳 左耳 右耳 左耳 右耳
平躺 70.9 69.9 61.5 60.0 54.5 52.9
10 30 ◦ 71.3 69.2 62.2 62.1 55.6 57.3
左转 60 ◦ 71.8 68.7 63.6 64.5 57.4 60.6
0
0 100 200 300 400 500 600 700 800 900 90 ◦ 72.2 68.5 63.5 65.5 59.3 62.2
ᮠဋ/Hz
30 ◦ 70.3 70.2 63.5 60.0 60.7 55.4
图 5 人工头右耳处两通道和四通道系统控制效果对比 右转 60 ◦ 70.1 70.6 65.9 60.5 62.9 56.6
Fig. 5 Control performances of two and four-channel 90 ◦ 70.5 71.1 67.4 61.1 64.5 57.7
systems at the right dummy ear
70.5 69.6 71.2 69.0 71.6 68.3 72.0 68.2 70.1 70.1 70.0 70.6 69.8 70.5 70.2 69.1 71.0 68.7 71.1 67.9 71.6 68.1 70.3 70.5 70.1 70.8 70.1 71.0
64.1 63.2 62.5 63.1 63.3 64.2 65.6 64.4 63.1 62.5 65.4 63.3 63.9 66.0 62.6 64.7
60.4 59.3 58.3 61.6 62.3 60.4 61.2 61.5 61.2 62.4 62.0 59.6 58.0 59.5 61.8 60.1 63.4 60.8 57.8 57.7 60.0 58.1 58.1 57.6 59.3 60.6 57.8 59.8 59.7 61.5 62.3
56.8
54.8 55.1 55.8 54.1 57.5 55.2 56.8 56.7
ࣱᢺ ࢻᣁ30° ࢻᣁ60° ࢻᣁ90° Կᣁ30° Կᣁ60° Կᣁ90° ࣱᢺ ࢻᣁ30° ࢻᣁ60° ࢻᣁ90° Կᣁ30° Կᣁ60° Կᣁ90°
ࢻܫѺݽ٪ܦ ԿܫѺݽ٪ܦ ࢻܫѺݽ٪ܦ ԿܫѺݽ٪ܦ
ࢻܫːᤰ᥋ጇፒ҄Ց٪ܦ Կܫːᤰ᥋ጇፒ҄Ց٪ܦ ࢻܫːᤰ᥋ጇፒ҄Ց٪ܦ Կܫːᤰ᥋ጇፒ҄Ց٪ܦ
ࢻܫپᤰ᥋ጇፒ҄Ց٪ܦ Կܫپᤰ᥋ጇፒ҄Ց٪ܦ ࢻܫپᤰ᥋ጇፒ҄Ց٪ܦ Կܫپᤰ᥋ጇፒ҄Ց٪ܦ
(a) ̡݀Քࢻረү5 cm (b) ̡݀ՔԿረү5 cm
71.1 70.6 71.6 70.0 72.0 69.3 72.6 68.9 70.5 70.9 70.5 71.3 70.2 71.1 70.2 68.7 71.3 68.8 71.8 68.3 72.1 67.9 70.4 69.9 69.5 69.5 70.5 70.4
64.8 65.3 63.5 65.2 64.0 64.0 64.3 65.8 66.1 65.7
62.0 60.9 63.2 61.6 60.7 63.2 62.3 59.4 63.4 63.0 60.7 62.1 61.2 61.9 59.6 63.1 62.7 60.6 60.7 61.4 61.6 60.8 59.9 61.8 62.9 59.6 60.5 61.0 64.1 62.6 60.3
56.9 57.5 58.9 58.5 58.8 57.2 57.5 58.8 58.5 58.8 56.1 57.8
55.0 55.7 54.8
ࣱᢺ ࢻᣁ30° ࢻᣁ60° ࢻᣁ90° Կᣁ30° Կᣁ60° Կᣁ90° ࣱᢺ ࢻᣁ30° ࢻᣁ60° ࢻᣁ90° Կᣁ30° Կᣁ60° Կᣁ90°
ࢻܫѺݽ٪ܦ ԿܫѺݽ٪ܦ ࢻܫѺݽ٪ܦ ԿܫѺݽ٪ܦ
ࢻܫːᤰ᥋ጇፒ҄Ց٪ܦ Կܫːᤰ᥋ጇፒ҄Ց٪ܦ ࢻܫːᤰ᥋ጇፒ҄Ց٪ܦ Կܫːᤰ᥋ጇፒ҄Ց٪ܦ
ࢻܫپᤰ᥋ጇፒ҄Ց٪ܦ Կܫپᤰ᥋ጇፒ҄Ց٪ܦ ࢻܫپᤰ᥋ጇፒ҄Ց٪ܦ Կܫپᤰ᥋ጇፒ҄Ց٪ܦ
(c) ̡݀Քʽረү5 cm (d) ̡݀Քʾረү5 cm
图 6 移动人头后各位置处控制前后效果对比图
Fig. 6 Control performances based on the regular algorithms, at different positions