
Page 87 - 201805
P. 87
第 37 卷 第 5 期 韩荣等: 鲁棒性有源头枕系统的设计方法 669
将人工头分别沿身体向上、下、左(向休息区域 但理论上控制效果不会随人头转动有较大变化。在
内侧移动)、右(向休息区域外侧移动) 移动 5 cm,并 初始辨识位置处,两通道和四通道系统使用鲁棒性
在各位置处将人工头分别向左右转动 30 、60 、90 , 算法的控制效果如表2所示。
◦
◦
◦
记录并分析控制前后双耳处噪声,两通道系统和四 -10
通道系统控制效果如图6所示。
-20
在初始辨识位置处和向不同方向移动人头后,
人头平躺及向左右转动不同角度,两通道和四通道 -30
控制系统在人双耳处均获得一定的控制效果,四通 ࣨए/dB -40
道系统的性能普遍优于两通道控制系统的性能。平 ࣱᢺͯᎶ
-50 Կᣁ60°
躺时,两通道和四通道系统在左右耳的控制效果分 ࢻᣁ60°
别有 9 dB、16 dB。但当人头转动,尤其是向右转动 -60 0 200 400 600 800 1000 1200
时,双耳处的降噪量和平躺时相比有较大的变化,左 ᮠဋ/Hz
(a) ጟᤰࣨᮠ־ऄ
右耳处残留噪声相差很大。这是由于一般方法在系
400
统辨识时只考虑人平躺时的次级通路,但并未考虑 300
ࣱᢺͯᎶ
人平移和转动时的次级通路,这种方法使得系统对 200 ࣱᢺͯᎶ
Կᣁ
Կᣁ60°
100 ࢻᣁ60°ࢻᣁࢻᣁࢻᣁ60°ࢻᣁࢻᣁ
人头转动的鲁棒性较差。 0
ᄱͯ/(°) -100
4 鲁棒性算法对系统性能的改善 -200
-300
对前述控制系统,平躺时两通道和四通道系 -400
统在左右耳处的控制效果较好,但人头转动时,双 -500 0 200 400 600 800 1000 1200
耳处降噪量差异很大。在初始辨识位置处,当人头 ᮠဋ/Hz
(b) ጟᤰᄱᮠ־ऄ
右转 90 时,两通道和四通道系统控制后左右耳处
◦
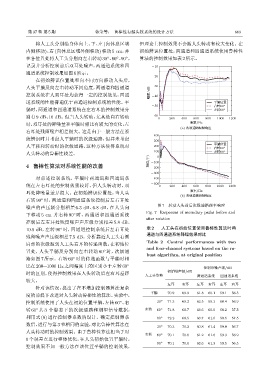
噪声的声压级分别相差 6.3 dB、6.8 dB,在人头向 图 7 转动人头前后次级通路频率响应
Fig. 7 Responses of secondary paths before and
下移动 5 cm 并右转 90 时,两通道和四通道系统
◦
after rotation
控制后左右耳处残留噪声声压级分别相差 5.8 dB、
10.9 dB,左转 90 时,四通道控制系统后左右耳处 表 2 人工头在初始位置使用鲁棒性算法时两
◦
通道与四通道系统降噪效果对比
残留噪声声压级相差7.5 dB。分析靠近人工头右侧
肩部的次级源到人工头右耳的传递函数,在初始位 Table 2 Control performances with two
and four-channel systems based on the ro-
置处,人头平躺及分别向左右转动 60 时,次级通
◦
bust algorithm, at original position
路如图 7 所示。右转 60 时的传递函数与平躺时相
◦
比在 200∼1000 Hz 之间幅度上的区别小于左转 60 ◦ 控制后噪声级/dB
时的区别,使得控制效果在人头转动后左右耳差距 初始噪声级/dB
人工头姿势 两通道系统 四通道系统
较大。
左耳 右耳 左耳 右耳 左耳 右耳
针对该情况,提出了在不增加控制器算法复杂
平躺 70.9 69.9 61.8 60.1 59.1 56.5
度的前提下改进对人头转动鲁棒性的算法。实验中,
控制系统使用了人头在初始位置平躺、左转 60 、右 30 ◦ 71.3 69.2 63.5 59.3 60.4 56.9
◦
转 60 共 3 个姿态下的次级通路和期望信号数据, 左转 60 ◦ 71.8 68.7 63.6 60.0 60.2 57.3
◦
利用式 (8) 进行控制器系数的设计。确定控制器系 90 ◦ 72.2 68.5 63.7 61.0 59.5 57.5
数后,进行与第 3 节相同的实验,对比鲁棒性算法在
30 ◦ 70.3 70.2 60.8 61.4 59.0 56.7
人头转动时的控制效果。由于鲁棒性算法相当于对
右转 60 ◦ 70.1 70.6 61.2 61.6 59.3 56.9
6 个误差点进行整体优化,在人头初始位置平躺时,
90 ◦ 70.1 70.6 62.6 61.3 59.5 56.5
控制效果不如一般方法在该位置平躺的控制效果,