
Page 92 - 201901
P. 92
88 2019 年 1 月
向 量 w 2 (n) = [ w 2,0 (n) w 2,1 (n) . . . w 2,M−1 (n) ] T Яᦊ
d↼n↽
的更新方程为 P↼z↽
y ↼n↽ yϕ↼n↽ +
w 2 (n + 1) = w 2 (n) − µd (n)e (n), (8) x↼n↽ + y↼n↽
′
′′
W ↼z↽ S↼z↽
+ + e↼n↽
⌣
T
⌣
′′
′′
其中,d (n) = [ d (n) d (n) . . . d ′′ (n) ] 为n 时 S↼z↽ S↼z↽
′′
0 1 M−1
xϕ↼n↽ yϕϕ↼n↽
ˆ
刻 M 长构造期望信号经建模的次级通道 S(z) 的滤 LMS
⌣
P↼z↽ dϕϕ↼n↽
波输出向量。 dϕ↼n↽ LMS eϕ↼n↽
⌣
S↼z↽
Яᦊ
W ↼z↽ y ↼n↽
P↼z↽
d↼n↽
y ↼n↽
y ϕ↼n↽
x↼n↽ dϕ↼n↽ +
⌣
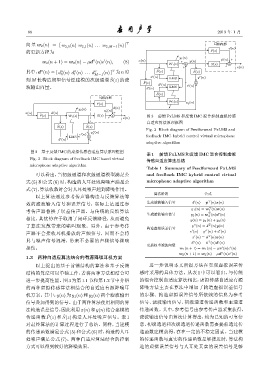
P↼z↽ W ↼z↽ S↼z↽ 图 3 前馈 FxLMS 和反馈 IMC 混合控制虚拟传感
+ e↼n↽
自适应算法原理框图
⌣
⌣
S↼z↽ S↼z↽
Fig. 3 Block diagram of Feedforward FxLMS and
+ y ϕϕ↼n↽
eϕ↼n↽
LMS feedback IMC hybrid control virtual microphone
dϕϕ↼n↽ +
adaptive algorithm
图 2 基于反馈 IMC 的虚拟传感自适应算法原理框图
表 1 前馈 FxLMS 和反馈 IMC 混合控制虚拟
Fig. 2 Block diagram of feedback IMC based virtual
传感自适应算法总结
microphone adaptive algorithm
Table 1 Summary of Feedforward FxLMS
可以看出,当初级通道和次级通道模型满足公 and feedback IMC hybrid control virtual
式(5) 和公式 (6) 时,构造的人耳处残留噪声满足公 microphone adaptive algorithm
式(7),算法收敛时会对人耳处噪声起到降噪作用。
算法阶段 公式
以上算法通过参考传声器构造与反馈算法等
T
′
效的滤波输入信号和误差信号,实际上是通过参 生成滤波输入信号 d (n) = ˆ p (n)x(n)
T
y 1 (n) = w (n)x(n)
考传声器替换了误差传声器。与传统的反馈算法 1
T
生成滤波输出信号 y 2 (n) = w (n)d (n)
′
2
相比,其优势在于取消了闭环反馈路径,从而避免 y(n) = y 1 (n) + y 2 (n)
了算法发散带来的啸叫现象。另外,由于参考传 y (n) = ˆ s (n)y(n)
T
′′
构造虚拟误差信号
′
′′
′
声器不会接收耳机播放的声频信号,因而不会将 e (n) = y (n) + d (n)
T
x (n) = ˆ s (n)x(n)
′
其与噪声信号混淆,带来不必要的声频信号频响 d (n) = ˆ s (n)d (n)
T
′
′′
更新权重滤波向量
损伤。 w 1 (n + 1) = w 1 (n) − µx (n)e (n)
′
′
′′
′
w 2 (n + 1) = w 2 (n) − µd (n)e (n)
1.3 两种自适应算法结合的有源降噪耳机方案
以上提出的基于前馈结构的算法和基于反馈 进一步说明本文所提方法在实现虚拟误差传
结构的算法可以单独工作,若将两种方法相结合可 感时采用的具体方法。从表 1 中可以看出,与传统
进一步提高性能。图 3 为第 1.1 节和第 1.2 节中介绍 的混合控制自适应算法相比,虚拟传感自适应有源
的两种虚拟传感算法相结合的自适应有源降噪耳 降噪方法主要在算法中增加了构造虚拟误差信号
机方案。其中,y(n) 为 y 1 (n) 和 y 2 (n) 两个滤波输出 的步骤。构造虚拟误差信号所依赖的信息为参考
信号叠加得到的信号。由于两种算法使用相同的算 信号、滤波输出信号、初级通道传递函数和主通道
法构造误差信号,因此利用x(n)和y(n)结合建模的 传递函数。其中,参考信号由参考传声器采集获得,
ˆ
ˆ
传递函数 P(z) 和 S(z) 构造人耳处噪声信号。表 1 滤波输出信号由算法计算得出,均为已知的可靠信
对最终算法的计算过程进行了总结。同样,当建模 息,初级通道和次级通道传递函数需要提前通过传
的传递函数满足公式 (5) 和公式 (6) 时,构造的人耳 递函数建模获得,存在一定的不稳定因素。当建模
处噪声满足公式 (7)。两种自适应算法结合的控制 的传递函数与真实的传递函数足够接近时,算法构
方式可以得到较好的降噪效果。 造的虚拟误差信号与人耳处真实的误差信号足够