
Page 118 - 应用声学2019年第4期
P. 118
578 2019 年 7 月
25 2ው֗4ው 18 3ው֗7ው
ԧၷࣰ๘ᄊːውእฉ˟ၥவՔࣀ/(O) 15 ԧၷࣰ๘ᄊːውእฉ˟ၥவՔࣀ/(O) 12 4ው֗6ው
16
2ው֗3ው
4ው֗7ው
3ው֗6ው
20
14
5ው֗7ው
3ው֗5ው
10
5ው֗6ው
8
10
6
0 5 4 2 0
0 20 40 60 80 100 0 20 40 60 80 100
ᄬಖவͯ/(O) ᄬಖவͯ/(O)
(a) ງˁᄬಖງए 50 m ู̿ (b) ງˁᄬಖງए 50 m ̿ງ
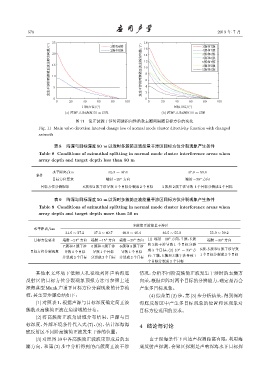
图 11 简正波簇干涉时两簇指向性函数主瓣间隔随目标方位的变化
Fig. 11 Main valve direction interval change law of normal mode cluster directivity function with changed
azimuth
表 8 阵深与目标深度 50 m 以浅时多簇简正波能量干涉区目标方位分裂现象产生条件
Table 8 Conditions of azimuthal splitting in normal mode cluster interference areas when
array depth and target depth less than 50 m
水平距离/km 32.3 ∼ 37.8 37.9 ∼ 59.6
条件
目标方位要求 端射 −25 方向 端射 −39 方向
◦
◦
目标方位分裂现象 4 簇和 2 簇干涉导致 1 个目标分裂成 2 个目标 3 簇和 2 簇干涉导致 1 个目标分裂成 2 个目标
表 9 阵深与目标深度 50 m 以深时多簇简正波能量干涉区目标方位分裂现象产生条件
Table 9 Conditions of azimuthal splitting in normal mode cluster interference areas when
array depth and target depth more than 50 m
多簇简正波能量干涉区
水平距离/km
31.6 ∼ 37.2 37.3 ∼ 40.7 40.8 ∼ 46.4 46.5 ∼ 55.8 55.9 ∼ 59.2
◦
目标方位要求 端射 −21 方向 端射 −15 方向 端射 −29 方向 (1) 端射 −10 方向:7 簇、5 簇 端射 −30 方向
◦
◦
◦
◦
和 3 簇干涉导致 1 个目标分裂
7 簇和 4 簇干涉 6 簇和 4 簇干涉 6 簇和 3 簇干涉
◦
◦
目标方位分裂现象 导致 1 个目标 导致 1 个目标 导致 1 个目标 成 3 个目标;(2) 10 ∼ 33 方 6 簇、5 簇和 3 簇干涉导致
向:7 簇、5 簇和 3 簇干涉导致 1 1 个目标分裂成 2 个目标
分裂成 2 个目标 分裂成 2 个目标 分裂成 2 个目标
个目标分裂成 2 个目标
其他水文环境下低频大孔径线列阵声呐海底 情况,分析不同阶高簇简正波发生干涉时的主瓣方
反射区的目标方位分裂现象预报方法可参照上述 向差,根据声阵对两个目标的分辨能力,确定是否会
深海典型Munk声道下目标方位分裂现象的计算流 产生多目标现象。
程,其主要步骤总结如下: (4) 综合第 (2) 步、第 (3) 步分析结果,得到深海
(1) 对照表 1,根据声源与目标深度确定简正波 海底反射区中产生多目标现象的位置和该现象对
簇数及高簇简正波在角谱域的分布。 目标方位范围的要求。
(2) 将高簇简正波角谱域分布结果、声源与目
标深度、外部环境条件代入式 (7)、(8),估计深海海 4 结论与讨论
底反射区不同阶高簇简正波发生干涉的位置。
(3) 对照图 10 中各高簇简正波波束形成后的主 由于深海条件下直达声探测距离有限,利用海
瓣方向,和第 (2) 步中分析得到的高簇简正波干涉 底反射声探测、会聚区探测是声呐深海水下目标探