
Page 26 - 应用声学2019年第5期
P. 26
778 2019 年 9 月
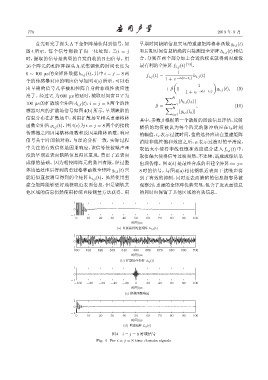
首先研究了探头 A 下全矩阵捕获得到信号,如 早期时间缺陷信息突显的重建矩阵格林函数 g i,j (t)
图 4 所示,每个信号都做了归一化处理,当 i = j 和后期时间信息精确的直接测量全矩阵h i,j (t)相结
时,提取的信号是典型的自发自收的 B 扫信号。用 合,分别在两个部分加上合适的权重就得到对成像
16 个阵元的相控阵探头 A 采集钢轨的时间长度为 最有利的全矩阵f i,j (t) [13] ,
0 ∼ 100 µs 的全矩阵数据 h i,j (t),其中 i = j = 8 两 1
f i,j (t) = −α(t−t c ) h i.j (t)
个的传感器对应的响应信号如图 4(a) 所示,可以看 1 + e
( )
出早期的信号几乎被相控阵自身的非线性效应湮 + β 1 − 1 g i,j (t), (9)
1 + e −α(t−t c )
没了。经过 T c 为600 µs 的延时,截取时间窗口 T 为 ∑ N
100 µs 的扩散场全矩阵 d i,j (t),i = j = 8 两个的传 i=1 |h i,i (t b )|
β = ∑ N , (10)
感器对应的扩散场信号如图 4(b) 所示,早期缺陷的 |g i,i (t b )|
i=1
信息分布在扩散场中,利用扩散场互相关重建格林
其中,参数 β 根据第一个散射的回波信息评估,反射
函数全矩阵 g i,j (t)。图4(c)为i = j = 8 两个的接收
幅值的均值被认为每个阵元的脉冲响应在 t b 时刻
传感器之间因果格林函数和反因果格林函数,响应 的幅值,t c 表示过渡时间,值的选择应该在重建矩阵
信号关于时间轴对称,与理论分析一致,实际过程 消除非线性饱和效应之后,α 表示过渡时的平滑度,
中关注的有效信息是因果响应,该信号使被噪声湮 取值太小使得非线性饱和效应成分进入 f i,j (t) 中,
没的早期近表面缺陷信息得以重现,奠定了近表面 取值偏大使得信号过渡突然,不连续,造成成像结果
成像的基础。因为相控阵阵元的数目有限,经过整 出现伪像。图 4(d)是最终合成的重建全矩阵 i= j=
体均值处理后得到的重建格林函数全矩阵g i,j (t)只 8 时的信号,与图 4(a) 相比钢轨近表面干扰噪声得
能近似直接测量得到的全矩阵 h i,j (t)。虽然使用重 到了有效的抑制,同时近表面缺陷的信息很容易被
建全矩阵能够更好地获取近表面信息,但是钢轨其 观察到,重建的全矩阵优势突显,包含了近表面信息
他区域的信息仍然使用传统直接测量方法获得。用 的同时也保留了其他区域的有效信息。
1
0
-1
0 10 20 30 40 50 60 70 80 90 100
ᫎ/µs
(a) ᄰଌᖍ४ᄊЛᅾ h i֒j↼t↽
1
0
-1
600 610 620 630 640 650 660 670 680 690 700
ᫎ/µs
(b) ੱஙڤЛᅾ d i֒j ↼t↽
1
0
-1
-100 -80 -60 -40 -20 0 20 40 60 80 100
ᫎ/µs
(c) ಫѦ־ऄ
1
0
-1
0 10 20 30 40 50 60 70 80 90 100
ᫎ/µs
(d) ᧘थᅾ f i֒j↼t↽
图 4 i = j = 8 时域信号
Fig. 4 For i = j = 8 time domain signals