
Page 82 - 应用声学2019年第5期
P. 82
834 2019 年 9 月
表 2 迭代次数中各方向坐标与实际坐标差值
Table 2 Difference between the estimated position and the actual
迭代次 1 2 3 4 5 6 7 8 9 10
∆Z/m −487.494 139.514 −33.021 8.242 −2.029 0.466 −0.164 −0.046 0.033 −0.001
∆X/m 30.331 −8.055 1.396 −0.940 −0.541 −0.478 −0.475 −0.473 −0.473 −0.472
∆Y /m 31.426 −8.465 1.486 −0.951 −0.544 −0.478 −0.478 −0.476 −0.476 −0.476
1.2 1.2
DX DX
1.0 DY 1.0 DY
DZ
ࠀͯፇ౧/m 0.8 ࠀͯፇ౧/m 0.8
DZ
0.6
0.6
0.4
0.2
0.2 0.4
0 0
వ ҫిࣱک ฑҿጟ వ ҫిࣱک ฑҿጟ
வข ܦᤴข ࡙नข ܦᤴข வข ܦᤴข ࡙नข ܦᤴข
(a) ᄬಖA (b) ᄬಖB
1.2 1.2
DX DX
1.0 1.0
DY 0.8 DY
DZ
DZ
0.8
ࠀͯፇ౧/m 0.6 ࠀͯፇ౧/m 0.6
0.4
0.4
0.2 0.2
0 0
వ ҫిࣱک ฑҿጟ వ ҫిࣱک ฑҿጟ
வข ܦᤴข ࡙नข ܦᤴข வข ܦᤴข ࡙नข ܦᤴข
(c) ᄬಖC (d) ᄬಖD
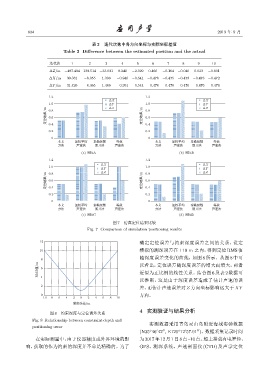
图 7 仿真定位结果比较
Fig. 7 Comparison of simulation positioning results
12 确定定位误差与约束深度误差之间的关系,设定
10 模拟的测深误差在 ±10 m 之内,得到定位 RMS 值
随深度误差变化的曲线,如图 8 所示。从图 8 中可
8
RMSϙ/m 6 以看出,定位误差随深度误差的增大而增大,两者
近似为正比例的线性关系。结合图 6 及表 2 数据可
4
以推断,这是由于深度误差造成了估计声速的误
2
差,而估计声速误差对 Z 方向坐标影响远大于 XY
0 方向。
-10 -8 -6 -4 -2 0 2 4 6 8 10
ງएឨࣀ/m
4 实测验证与结果分析
图 8 约束深度与定位误差关系
Fig. 8 Relationship between constraint depth and
实测数据采用青岛灵山岛附近海域实验数据
positioning error
(N35 46 42 , E120 12 57.91 )。数据采集记录时间
◦
′
′′
◦
′
′′
在实际测量中,由于仪器精度或外界环境的影 为2017年12月1日8点–10点。船上搭载有电罗经、
响,获取的作为约束的深度并不总是精确的。为了 GPS、测深系统、声速剖面仪 (CTD) 及声学定位