
Page 22 - 《应用声学》2020年第4期
P. 22
508 2020 年 7 月
表 1 在不同观测误差条件下的两种方法性能 均方位变化率如图11所示。平均方位变化率是随着
Table 1 The estimation performance of the 初始距离的增大而逐渐减小,两种方法的航向估计
method with different observation error 均方根误差随着初始距离的增大而逐渐增大。不同
目标速度条件下,两种方法的航向估计均方根误差
方位估计 距离特征 收敛时间/min 估计精度/( )
◦
误差标准 量估计误 如图12所示,观测时间内的平均方位变化率如图 13
文献 [5] 本文方法 文献 [5] 本文方法
差/( ) 差标准差 所示。平均方位变化率是随着目标速度的增大而逐
◦
0.1 0.05 5.8 4.5 1.05 0.31
360 ĺ60
0.5 0.05 10.2 5.2 4.56 0.68
1.0 0.05 13.6 6.1 8.88 1.23 300 50
2.0 0.05 14.9 6.5 17.09 2.63
240 40
0.3 0.01 7.8 4.6 2.43 0.39 ᓈՔ/(°) 180 30
0.3 0.05 7.8 4.8 2.43 0.43 کவಪឨࣀ/(°)
120 20
0.3 0.20 7.8 9.3 2.43 1.04
0.3 0.50 7.8 16.0 2.43 2.62 60 10
0 0
下面分别研究两种方法在不同目标航向、不同 0 5 10 15 20
ᫎ/min
初始距离和不同目标速度条件下的方法性能,其余
(a) [5]
仿真条件与目标进行匀速直线运动时的仿真条件
360 ĺ60
相同。目标方位和距离特征量的观测误差均服从零
300 50
均值的高斯分布,方位估计误差标准差 σ θ = 0.5 ,
◦
240 40
距离特征量估计误差标准差 σ m = 0.05,蒙特卡洛
仿真的次数为 100次。定义 θ r 为观测时间范围内的 ᓈՔ/(°) 180 30 کவಪឨࣀ/(°)
平均方位变化率,即 120 20
K
1 ∑ 60 10
θ r = ¯ ¯ (28)
θ k+1 − θ k ,
(K + 1) T
k=0 0 0
0 5 10 15 20
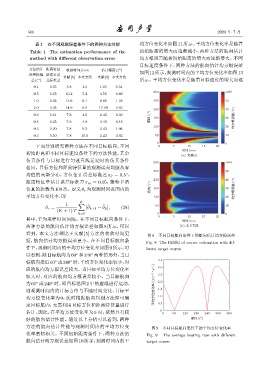
其中,T 为采样时间间隔。在不同目标航向条件下, ᫎ/min
两种方法的航向估计均方根误差如图 8 所示,可以 (b) వவข
看到,本文方法相比于文献 [5] 方法的收敛时间更 图 8 不同目标航向条件下的航向估计均方根误差
短,航向估计均方根误差更小。在不同目标航向条 Fig. 8 The RMSE of course estimation with dif-
件下,观测时间内的平均方位变化率如图 9 所示,可 ferent target course
以看到,除目标航向为60 和240 两种情形外,当目
◦
◦
标航向接近60 或240 时,平均方位变化率较小,对 3.5
◦
◦
应的航向均方根误差较大。当目标平均方位变化率 3.0
较大时,对应的航向均方根误差较小。当目标航向 2.5
为 60 或 240 时,即目标沿图 2 中的虚线进行运动, ࣱکவͯԫӑဋ/(10 -2 °Ss -1 ) 2.0
◦
◦
则观测时间内的目标方位与不随时间变化,目标平 1.5
均方位变化率为 0,此时根据航向判别方法即可确 1.0
定目标航向,无需利用目标方位和距离特征量进行 0.5
估计,因此,在平均方位变化率为 0 时,依然具有较 0 0 60 120 180 240 300 360
好的航向估计性能。通过以上分析可以看到,两种 ᓈՔ/(°)
方法的航向估计性能与观测时间内的平均方位变 图 9 不同目标航向条件下的平均方位变化率
化率密切相关。不同初始距离条件下,两种方法的 Fig. 9 The average bearing rate with different
航向估计均方根误差如图10所示,观测时间内的平 target course