
Page 19 - 《应用声学》2020年第4期
P. 19
第 39 卷 第 4 期 董阁等: 利用频域 β-warping 变换的浅海目标航向估计方法 505
v
y u L
1
u ∑ ( ) 2
ˆ
¯
RMSE(k) = t ϕ − ϕ k,l , (26)
ᄬಖ L
Ĉ l=1
ˆ
θ 其中,ϕ k,l 为 k 时刻第 l 次蒙特卡洛仿真的航向估计
O x
值,L为蒙特卡洛仿真的样本总数。
ĉ
3 仿真研究
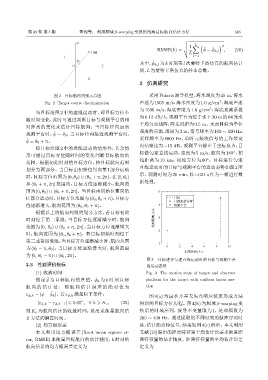
图 2 目标航向判别示意图 采用 Pekeris波导模型,海水深度为 45 m,海水
3
Fig. 2 Target course discrimination 声速为 1505 m/s,海水密度为 1.0 g/cm ;海底声速
3
为1596 m/s,海底密度为 1.6 g/cm ,海底衰减系数
当目标沿图 2 中的虚线运动时,即目标方位不
为0.12 dB/λ。观测平台为位于水下20 m的64元水
随时间变化,此时可通过判断目标与观测平台的相
平均匀直线阵,阵元间距为0.5 m。水面目标为单位
对距离的变化来估计目标航向。当目标径向远离
ˆ
观测平台时,ϕ = θ 0 ;当目标径向接近观测平台时, 强度的点源,深度为3 m。信号频率为100 ∼ 500 Hz,
采样频率为 4000 Hz,单阵元接收信号的工作带宽
ˆ
ϕ = θ 0 + π。
内信噪比为 −15 dB。观测平台静止于坐标原点,目
除目标沿图 2 中的虚线运动的情形外,其余情
标做匀速直线运动,速度为 5 m/s,航向为 180 ,初
◦
形可通过目标方位随时间的变化判断目标航向的
始距离为 10 km,初始方位为 60 。目标进行匀速
◦
范围。根据初始时刻的目标方位,将目标航向范围
直线运动时的目标与观测平台的运动态势如图 3 所
划分为两部分。当目标由初始位置向第 I 部分运动
示。观测时间为 20 min,以1.024 s 作为一帧进行数
时,目标方位范围为 [0, θ 0 ) ∪ (θ 0 + π, 2π],在 [0, θ 0 )
据处理。
和 (θ 0 + π, 2π] 范围内,目标方位逐渐减小,航向范
围为 [0, θ 0 ) ∪ (θ 0 + π, 2π]。当目标由初始位置向第 6
II部分运动时,目标方位范围为(θ 0 , θ 0 + π),目标方 ᄬಖ
ᄬಖᡑݽͯᎶ
位逐渐增大,航向范围为(θ 0 , θ 0 + π)。 4 ࣱԼ
根据以上的航向判别的划分方法,若目标初始
时刻位于第二象限,当目标方位逐渐减小时,航向 ӒՔᡰሏ/km 2
范围为 [0, θ 0 ) ∪ (θ 0 + π, 2π];当目标方位逐渐增大
0
时,航向范围为 (θ 0 , θ 0 + π)。若目标初始时刻位于
第三或第四象限,当目标方位逐渐减小时,航向范围
-2
为 (θ 0 − π, θ 0 );当目标方位逐渐增大时,航向范围 0 2 4 6 8 10
ˌՔᡰሏ/km
为[0, θ 0 − π) ∪ (θ 0 , 2π]。
图 3 目标进行匀速直线运动时的目标与观测平台
2.3 性能评价指标 的运动态势
(1) 收敛时间 Fig. 3 The motion state of target and observer
ˆ
¯
假定 ϕ 为目标航向的真值,ϕ k 为 k 时刻目标 platform for the target with uniform linear mo-
航 向 的 估 计 值, 则 航 向 估 计 误 差 的 绝 对 值 为 tion
¯
ˆ
ε ϕ,k = |ϕ − ϕ k |。若ε ϕ,k 满足以下条件: 图 4(a) 为最小方差无失真响应波束形成方法
|ε ϕ,k − ε ϕ,k−1 | 6 0.05 , ∀ k > K c , (25) 得到的目标方位历程。图 4(b) 为频域 β-warping 变
◦
则 K c 为航向估计的收敛时间,是用来衡量航向估 换后的时域序列,波导不变量取为 1,处理频段为
计方法的解算时间。 200 ∼ 400 Hz。通过提取的不同时刻的脉冲序列时
(2) 均方根误差 延,估计距离特征量,结果如图4(c)所示。本文利用
本文利用均方根误差 (Root mean square er- 文献[13]提出的距离特征量平均估计误差来衡量距
ror, RMSE) 来衡量目标航向的估计精度,k 时刻的 离特征量的估计精度。距离特征量的平均估计误差
航向估计的均方根误差定义为 定义为