
Page 21 - 《应用声学》2020年第4期
P. 21
第 39 卷 第 4 期 董阁等: 利用频域 β-warping 变换的浅海目标航向估计方法 507
15 向。而本文方法由于引入了距离特征量信息,无需
目标保持匀速直线运动,在目标进行变速直线运动
时,依然具有较好的航向估计性能。
ᤴए/(mSs -1 ) 10 估计性能。目标与观测平台的运动态势与目标进行
下面分析两种方法在不同观测误差条件下的
5
匀速直线运动时的仿真条件相同,目标方位和距离
特征量的观测误差均服从零均值的高斯分布,蒙特
0 卡洛仿真的次数为 100次。在不同观测误差条件下,
0 5 10 15 20
ᫎ/min 两种方法的性能如表1所示。根据表 1可以看出,当
图 6 目标速度 距离特征量估计误差一定时,随着方位估计误差的
Fig. 6 Target velocity 增大,两种方法的收敛时间逐渐增大,航向估计精度
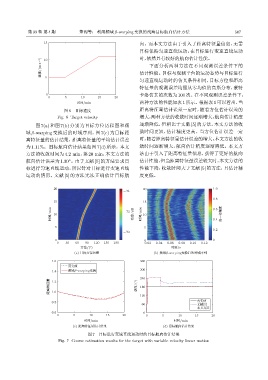
图 7(a) 和图 7(b) 分别为目标方位历程图和频 逐渐降低,但相比于文献 [5] 的方法,本文方法的收
域 β-warping 变换后的时域序列,图 7(c) 为目标距 敛时间更短,估计精度更高。当方位估计误差一定
离特征量的估计结果,距离特征量的平均估计误差 时,随着距离特征量估计误差的增大,本文方法的收
为1.11%。目标航向估计结果如图 7(d) 所示,本文 敛时间逐渐增大,航向估计精度逐渐降低。本文方
方法的收敛时间为 4.2 min,第20 min,本文方法的 法由于引入了距离特征量信息,获得了更好的航向
航向估计误差为 1.30 。由于文献 [5] 的方法要求目 估计性能,但当距离特征量误差较大时,本文方法的
◦
标进行匀速直线运动,所以针对目标进行变速直线 性能下降,收敛时间大于文献 [5] 的方法,且估计精
运动的情形,文献 [5] 的方法无法正确估计目标航 度更低。
20 20 1.0
-71
0.8
15 15
ᫎ/min 10 -72 Ҫဋ/dB ᫎ/min 10 0.6 ॆʷӑࣨए
0.4
5 5
0.2
-73
0 0 0
0 30 60 90 120 150 180 0.02 0.04 0.06 0.08 0.10 0.12
வͯ/(°) ण/s
(a) ᄬಖவͯԋሮ (b) ᮠ۫β-warpingԫ૱Ցᄊ۫ऀѵ
1.6 360
ᄾࠄϙ
1.4 ᮠ۫β-warpingԫ૱ 300
240
ᡰሏྲढ़᧚ ᓈՔ/(°) 180
1.2
1.0
120
0.8 ᄾࠄϙ
60 [5]
వவข
0.6 0
0 5 10 15 20 0 5 10 15 20
ᫎ/min ᫎ/min
(c) ᡰሏྲढ़᧚ͥᝠፇ౧ (d) ᄬಖᓈՔͥᝠፇ౧
图 7 目标进行变速直线运动时的目标航向估计结果
Fig. 7 Course estimation results for the target with variable velocity linear motion