
Page 51 - 《应用声学》2021年第4期
P. 51
第 40 卷 第 4 期 刘舒宁等: 压缩感知在宽带声学多普勒测速技术中的应用 535
绍的离散傅里叶变换基和离散余弦变换基) 都不相 x = Ψα 即可求得重构信号 ˆ x。回波信号的压缩感
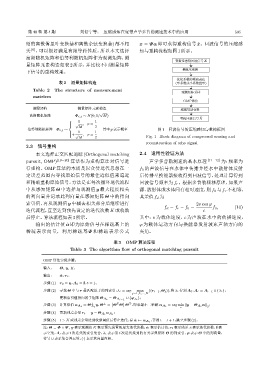
关 [6] ,可以很好满足有限等距性质,所以本文选择 知与重构流程如图1所示。
高斯随机矩阵和伯努利随机矩阵作为观测矩阵,测
ࠕࣜܳҿڀฉηՂX
量矩阵元素构造如表 2 所示,并比较不同测量矩阵
ሪႠ۳ԫ૱
下信号的重构效果。
͖ӑጇᄊሪႠ᛫
表 2 测量矩阵构造 (ᭆጇੋ࠵ጇᎶᭆ)
Table 2 The structure of measurement
ᅾ᧔ನ
matrices
OMPካข
测量矩阵 测量矩阵元素构造 ሪႠ۳ᤤԫ૱
( √ )
高斯随机矩阵 Φ i,j ∼ N 0, 1/ M
᧘ڀฉηՂ ^
X
1 1
− , p =
√
M 2
伯努利随机矩阵 Φ i,j ∼ 其中 p 表示概率 图 1 回波信号的压缩感知与重构框图
1 1
+√ , p =
M 2 Fig. 1 Block diagram of compressed sensing and
reconstruction of echo signal
2.3 信号重构
本文选择正交匹配追踪 (Orthogonal matching 2.4 适用性验证方法
pursuit, OMP) [19−20] 算法作为重构算法对信号进 声学多普勒测速的基本原理 [11−12] 为:频率为
行重构。OMP 算法的本质是以贪婪迭代思想在一 f 0 的声波信号在水体中传播并经水中散射体反射
定误差范围内寻找原始信号的最佳近似值来逼近 后传播至换能器接收得到回波信号,处理计算得到
和精确重构原始信号,方法是在每次循环迭代流程 回波信号频率为 f r 。根据多普勒频移原理,如果声
中从感知矩阵 Θ 中选择与观测值 y 最大程度相关 源、散射体或水体间有相对速度,则f 0 与f r 不相等,
的列向量并记录此列向量在感知矩阵 Θ 中的指向 其差值f d 为
索引值,再从观测值 y 中减去相关部分后继续进行 2v cos φ
f d = f r − f 0 = f 0 , (10)
迭代流程,直至达到预先设定的迭代次数K 或收敛 c
后停止。算法流程如表3所示。 其中:v 为载体速度,c 为声波在水中的传播速度,
输出的估计值 ˆ α 即为原始信号在稀疏基上的 φ 为载体运动方向与换能器发射波束声轴方向的
稀疏表示向量,利用稀疏基 Ψ 和稀疏表示公式 夹角。
表 3 OMP 算法流程
Table 3 The algorithm flow of orthogonal matching pursuit
OMP 算法实现步骤:
输入: Θ, y, K;
输出: ˆ α,r t;
步骤 (1) r 0 = y,Λ 0 = ∅,t = 1;
步骤 (2) 寻找 Θ 中与 r 最匹配原子的列索引:λ t = arg max |⟨r t−1 , Θ j ⟩|;将 λ t 存到 Λ 0 :Λ t = Λ t−1 ∪ {λ t};
j=1,2,...,N
};
更新索引值指向的子矩阵 Θ Λ t = Θ Λ t−1 ∪ {φ λ t
( )
= Θ ⊥ y,Θ ⊥ T T α∥ ;
步骤 (3) 计算似值 α Λ t = Θ Θ Θ ,即求最小二乘解 α Λ t = arg min ∥y − Θ Λ t
Λ t x 2
;
步骤 (4) 更新残差余量 r t = y − Θ Λ t α Λ t
;否则 t = t + 1,跳至步骤 (2)。
步骤 (5) t > K 或残差余量达到收敛阈值后停止迭代,有 ˆ α ← α Λ t
注:Θ = Φ × Ψ, y 表示观测值 K 表示预先设置的最大迭代次数, ˆ α 表示估计值,r t 表示残差,t 表示迭代次数,∅ 表
示空集,Λ t 表示 t 次迭代的索引集合,λ t 表示第 t 次迭代找到的有关字典矩阵 Θ 的列索引,φ 表示 Θ 中的列向量,
符号 ∪ 表示集合并运算,⟨·⟩ 表示求向量内积。