
Page 105 - 《应用声学》2022年第1期
P. 105
第 41 卷 第 1 期 阚婷婷等: 板状结构 Lamb 波频散补偿与聚焦接收成像检测 101
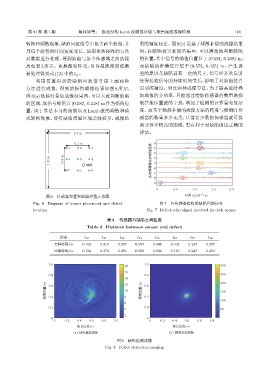
转换和频散现象,缺陷回波信号中包含两个波包,并 果的精度较差。图8(b)是基于频散补偿的成像结果
且每个波包的时间宽度变长。应用聚焦接收的方法 图,在缺陷位置处能量集中,可以清楚地判断缺陷
对数据进行处理,得到缺陷与各个传感器之间的距 的位置,其中信号的峰值位置位于(0.591, 0.408) m,
离如表 3 所示。更换激发阵元,对各组缺陷回波数 而缺陷的准确位置位于 (0.575, 0.425) m,产生误
据处理得到式(13)中的l ij 。 差的原因是缺陷具有一定的尺寸,信号经多次反射
利用仿真得到的缺陷回波信号用上面两种 使得接收信号的持续时间变长,影响了对缺陷位置
方法进行成像,得到的损伤成像结果如图 8 所示, 识别的精度。对比两种成像方法,为了提高延时叠
图 8(a) 是延时叠加成像结果图,可以大致判断缺陷 加成像的分辨率,只能通过增加传感器的数量来抑
的区域,取信号峰值点 (0.587, 0.418) m作为损伤位 制其他位置波的干扰,增加了检测的计算量与复杂
置,由于算法本身的限制以及 Lamb 波的频散和模 度。而基于频散补偿的成像方法的精度与检测时传
式转换现象,使得缺陷周围区域杂波较多,成像结 感器的数量多少无关,只需要少数的传感器就可得
到分辨率较高的图像,更有利于对缺陷做出正确的
1.0 m 评估。
0.3 m 8
1 2 3 7 6
1.0 m 0.3 m 8 0 Ꭵᬞ 4 Պ͜ਖ٨ଌஆᄊᎥᬞڀฉ 5 3
7 6 5 2 1
4 0
0 0.5 1.0 1.5 2.0
图 6 传感器布置和缺陷位置示意图 ᫎ t/(10 -4 s)
Fig. 6 Diagram of sensor placement and defect 图 7 各传感器接收的缺陷回波信号
location Fig. 7 Defect echo signal received by each sensor
表 3 传感器与缺陷之间距离
Table 3 Distance between sensor and defect
距离 l 40 l 41 l 42 l 43 l 45 l 46 l 47 l 48
实际距离/m 0.106 0.318 0.237 0.237 0.106 0.106 0.237 0.237
计算距离/m 0.122 0.374 0.256 0.258 0.122 0.116 0.247 0.250
1.0 1.0
18 300
16
0.8 0.8 250
14 200
ࠕͯᎶ/m 0.6 10 ࠕͯᎶ/m 0.6 150
12
8
0.4
0.4
100
6
0.2 0.2
4 50
2
0 0
0 0.2 0.4 0.6 0.8 1.0 0 0.2 0.4 0.6 0.8 1.0
᫂ͯᎶ/m ᫂ͯᎶ/m
(a) णԯҫੇϸ (b) ᮠஙᛪϪੇϸ
图 8 缺陷检测成像
Fig. 8 Defect detection imaging