
Page 42 - 《应用声学》2022年第1期
P. 42
38 2022 年 1 月
号,实现 8 dB 的路噪控制。然而,此方法使用声学
的参考信号,无法避免参考传声器拾取车内人声,很
难走向实用。对于车内路噪控制的反馈算法 [19−20] ACC2
虽然可以不用参考信号,但是反馈算法的水床效应
使得高频噪声抬升,影响了降噪效果。对于经过底 ACC1
ACC5
盘振动传递到车内的这类传递路径明确的路噪声,
前馈算法稳定并且能够获得更好的降噪效果。同时
使用加速度计提供参考信号可以避免声学反馈问 (a) ᢼᣚҒᦊ ˔ҫᤴएᝠ
题,因此本文选取以加速度计作为参考的前馈控制
算法对车内路噪进行控制。通过前期对于车内噪声
特性、相干性以及传递路径分析,选取了5 个较好的
ACC3
参考点对于噪声进行前馈控制。
ACC4
3.1 头靠系统布置
在某品牌纯电动汽车中布置了一个 5×2×2
的 ANC 系统如图 7 所示,系统包含 5 个加速度计
(ACC1-ACC5)、2 个次级源 (SS1、SS2)、2 个误差点 (b) ᢼᣚՑᦊҫᤴएᝠ
(ES1、ES2) 以及 2 个监测点 (MS1、MS2)。5 个加速
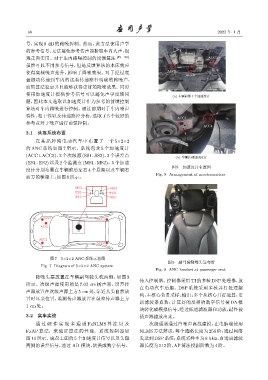
图 8 加速度计布置图
度计分别布置在车辆前后左右4 个悬架以及车辆右
Fig. 8 Arrangement of accelerometers
前方的横梁上,如图8所示。
MS1 MS2
ES1 ES2
SS1 SS2
ACC1 ACC3
ACC5
ACC2
ACC4
图 7 5×2×2 ANC 系统示意图
图 9 副驾驶降噪头靠布置
Fig. 7 Diagram of 5×2×2 ANC system
Fig. 9 ANC headset at passenger seat
降噪头靠放置在车辆副驾驶头枕两侧,如图 9
传入控制器。控制器采用TI的多核DSP处理器,放
所示。次级声源使用的是 7.62 cm 扬声器,误差传
在电动汽车后座。DSP 系统采用多核并行处理架
声器放置在次级声源上方 5 cm处,靠近人头自然放
构,主核心负责采样、输出;多个从核心并行运算,更
置时耳朵位置,监测传声器放置在误差传声器上方
新滤波器系数;计算好的反相的数字信号被 DA 模
1 cm处。
块转化成模拟信号,经过低通滤波器和功放,最终被
3.2 实车实验 扬声器播放出来。
通 过 硬 件 实 现 多 通 道 FxNLMS 算 法 以 及 次级通道通过白噪声离线建模,在电脑端使用
FxAP 算法,来验证算法的性能。系统控制器如 NLMS方法辨识,每个通路长度为256阶,通过网络
图10所示。底盘上面的5 个加速度计信号以及头靠 发送到DSP系统;系统采样率为8 kHz,自适应滤波
两侧的误差信号,通过 AD 模块,转换成数字信号, 器长度为512阶,AP算法投影阶数为4阶。