
Page 41 - 《应用声学》2022年第1期
P. 41
第 41 卷 第 1 期 宫臣等: 多通道 FxAP 算法的电动汽车路噪控制 37
表 1 不同算法复杂度
Table 1 Complexity of different algorithms
算法 加法次数 乘法次数
FxNLMS C + C ×
3
3
FxAP C + + O((KP) ) C × + O((KP) )
3
MFxAP C + + O((KP) ) + (IJL − 1) × KP + IJK × (M − 1) C + + O((KP) ) + IJL × KP + IJK × M
3
3
3
Fast FxAP C + + O((KP) ) C × + O((KP) ) + (L − 1) × P
3
注: O((KP) ) 表示维度为 KP 的方矩阵求逆所需要的计算量。
2.4 算法仿真 100
本节使用图 1 中的汽车运行数据进行仿真,仿
90
真用参考信号为车内误差传声器采集的噪声信号
Origin
向前时延 100 点获得,次级通路传递函数如图 5 所 80 FxNLMS
示。S 1,1 表示 1 号扬声器到达 1 号误差点之间的传 ܦԍጟ/dB FxAP
Fast FxAP
MFxAP
递函数,其余命名以此类推。次级通路比较理想,主 70
要集中在前100阶。 60
仿真参数按照如下设置:滤波器长度 L = 512,
次级通路长度 M = 256,步长 µ = 0.001,投影阶数 50 0 50 100 150
P = 4,仿真采样率为8000 Hz。 ුᢼᛡᫎ/s
(a) ʹᫎܦԍጟ
0.03
65.2
S 1,1
FxAP
S 1,2
0.02
65.0
S 2,1
S 2,2
0.01 64.8
ࣨए ܦԍጟ⊳dB Fast FxAP
0 64.6
-0.01 64.4 MFxAP
64.2
-0.02 35.5 36.0 36.5
0 200 400 600 800 1000
ුᢼᛡᫎ/s
᧔ನག
(b) ࡍᦊᫎܦԍጟ
图 5 次级通路传递函数
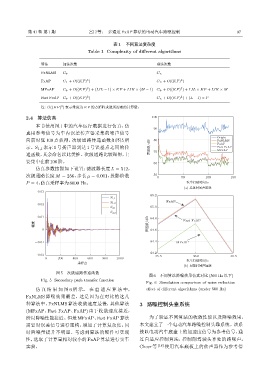
图 6 不同算法降噪效果仿真对比 (500 Hz 以下)
Fig. 5 Secondary path transfer function
Fig. 6 Simulation comparison of noise reduction
仿 真 结 果 如 图 6 所 示。 在 自 适 应 算 法 中, effect of different algorithms (under 500 Hz)
FxNLMS 降噪效果最差,这是因为在对比的这几
种算法中,FxNLMS 算法收敛速度最慢,其他算法 3 路噪控制头靠系统
(MFxAP、Fast FxAP、FxAP) 由于收敛速度接近,
所以降噪性能接近。但是MFxAP、Fast FxAP算法 为了验证不同算法的收敛性能以及降噪效果,
需要对误差信号进行重构,增加了计算复杂度,同 本文建立了一个电动汽车路噪控制头靠系统。该系
时降噪量提升不明显。考虑到算法的硬件可实现 统以电动汽车底盘上的加速度信号为参考信号,通
性,选取了计算量相对较小的 FxAP 算法进行实车 过自适应控制算法,控制副驾驶头靠处的路噪声。
实验。 Cheer 等 [18] 使用汽车底板上的传声器作为参考信