
Page 37 - 《应用声学》2022年第1期
P. 37
第 41 卷 第 1 期 宫臣等: 多通道 FxAP 算法的电动汽车路噪控制 33
本文通过分析电动汽车噪声特性,指出了算
0 引言
法收敛速度对于噪声控制效果的重要性。针对
FxNLMS 算法在路噪控制中收敛速度慢、降噪量低
主动噪声控制 (Active noise control, ANC) 技
的问题,使用了一种基于多通道 FxAP 算法的道路
术从 20 世纪 80 年代开始在汽车行业应用 [1−4] ,研
噪声控制算法来提升噪声追踪性能,提升降噪量。
究范围已覆盖发动机噪声控制 [5] 、传动系统噪声、
路噪和风噪控制 [6−8] 、车内听感改善 [9−11] 等多个 最终,本文将所提算法应用于降噪头靠系统中,并通
方面。过去车内噪声控制主要关注于发动机转速 过实车道路降噪实验验证了所搭建系统的可行性,
相关的线谱噪声,线谱噪声可以通过汽车转速计获 该头靠系统在电动汽车路噪控制方面有借鉴意义。
取,对于线谱噪声的控制已经形成了较为成熟的应
1 电动汽车噪声特性分析
用 [12] 。
现阶段,车辆的电动化已逐渐成为交通运输 在 ANC 中,通过获取参考信号以及误差信号,
领域发展的新方向。电动汽车没有发动机燃烧噪 求取系统的维纳解。控制器将参考信号与维纳解卷
声,因此路噪控制成为主动噪声控制技术的关注重 积输出,抵消噪声信号。在噪声平稳条件下,维纳解
点 [5] 。道路噪声频带宽、传递路径复杂、参考信号不 是系统的最优解。
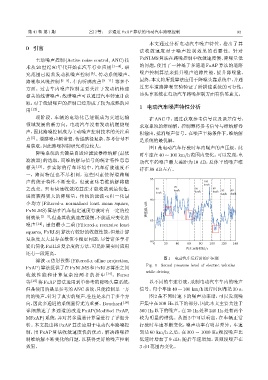
易获取,因此路噪控制研究难度较大。 图 1 是电动汽车行驶时车内噪声的声压级。此
降噪系统的关键是自适应滤波器维纳解 (最优 时车速在40 ∼ 100 km/h范围内变化。可以发现,电
滤波器) 的选取,而维纳解与信号的统计特性息息 动汽车的噪声最大差距为 10 dB,总体平均噪声维
相关 [13] 。在实际的行车环境中,汽车行驶速度不 持在88 dB左右。
一,路面特征也不尽相同,这些因素使得道路噪
95
声的统计特性不断变化,也就意味着维纳解将随 100
km/h
之改变。只有快速收敛的算法才能收敛到最优值, 80 70 90 60 50 40
km/h
km/h km/h km/h km/h km/h
进而获得更大的降噪量。传统的滤波 -x 归一化最
90
小均方 (Filtered-x normalized least mean square,
FxNLMS) 算法在汽车恒定速度行驶时有一定的控 ܦԍጟ/dB
制效果 [2−3] ,但是其收敛速度缓慢,不能适应变化的
85
噪声 [14] ;递归最小二乘 (Filtered-x recursive least
squares, FxRLS)算法有较好的收敛性能,但是计算
复杂度太大且存在数值不稳定问题,尽管诸多学者
80
0 20 40 60 80 100 120 140
提出简化FxRLS复杂度的方法,可是距离实时应用
ුᢼᤂᛡᫎ/s
还有一段距离。
图 1 电动汽车运行时的声压级
滤波 -x 仿射投影 (Filtered-x affine projection,
Fig. 1 Sound pressure level of electric vehicles
FxAP)算法提供了在 FxNLMS和FxRLS 算法之间
while driving
收敛性能和计算复杂度两者的折中 [14] 。Ferrer
等 [15] 将FxAP算法运用到单参考的降噪头靠系统, 以不同的车速行驶,录制电动汽车车内的噪声
但是使用的是单参考的ANC系统,只能控制单一方 信号。每个车速40 ∼ 100 km/h运行时间都是30 s。
向的噪声。针对于真实的噪声,往往是来自于多个方 图 2 是不同时速下的噪声功率谱,可以发现噪
向,因此多通道的系统显得尤为重要。Bouchard [16] 声集中在500 Hz 以下的部分,因此本文主要关注于
详细描述了多通道的改进 FxAP(Modified FxAP, 500 Hz以下的噪声。在30 Hz处和240 Hz处有两个
MFxAP) 系统,并对其多通道计算量进行了详细分 较为明显的谱线。从图 2 中可以看出,在车辆正常
析。本文提出将 FxAP 算法应用于电动汽车路噪控 行驶时车速不断变化,噪声功率有明显差异。车速
制,用 FxAP 算法收敛速度快的优点,解决路噪控 到达 60 km/h 之后,在 300 ∼ 1000 Hz 频段噪声比
制维纳解不断变化的问题,以获得更好的噪声控制 低速时增加了 9 dB;随后车速增加,该频段噪声在
效果。 3 dB范围内变化。