
Page 38 - 《应用声学》2022年第1期
P. 38
34 2022 年 1 月
80 [2]
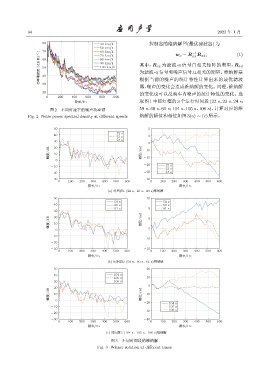
40 km/h 控制器的维纳解 (最优滤波器)为
50 km/h w o = R −1 R xd , (1)
70
60 km/h
Ҫဋ៨ࠛए/(dBSHz -1 ) 60 80 km/h 其中,R xx 为滤波 -x 信号自相关矩阵的期望,R xd
70 km/h
xx
90 km/h
100 km/h
50
为滤波-x信号和噪声信号互相关的期望。维纳解是
40
根据当前的噪声的统计特性计算出来的最优滤波
30
器,噪声的变化会造成维纳解的变化。同理,维纳解
20
的变化也可以反映车内噪声的统计特性的变化。选
0 200 400 600 800 1000
ᮠဋ/Hz 取图 1 中画红框的 3 个运行时间段 (22 s、23 s、24 s;
图 2 不同时速下的噪声功率谱 59 s、60 s、61 s;104 s、105 s、106 s),计算对应的维
Fig. 2 Noise power spectral density at different speeds 纳解的幅值和相位如图3(a) ∼ (c)所示。
50 5
22 s
40 0
23 s
24 s
30
-5
20
ࣨए/dB 10 ᄱͯ/rad -10
0 -15
-20 22 s
-10
23 s
-20 -25 24 s
-30 -30
0 100 200 300 400 500 600 0 100 200 300 400 500 600
ᮠဋ/Hz ᮠဋ/Hz
(a) ᫎ1 (22 snj23 snj24 s)፥ጪᝍ
50 10
59 s 59 s
40 60 s 60 s
61 s 5 61 s
30
ࣨए/dB 20 ᄱͯ/rad 0
10
0 -5
-10
-10
-20
-30 -15
0 100 200 300 400 500 600 0 100 200 300 400 500 600
ᮠဋ/Hz ᮠဋ/Hz
(b) ᫎ2 (59 snj60 snj61 s)፥ጪᝍ
50 20
40 104 s
105 s 10
30 106 s
0
20
ࣨए/dB 10 ᄱͯ/rad -10
0
-20 104 s
-10 105 s
-30 106 s
-20
-30 -40
0 100 200 300 400 500 600 0 100 200 300 400 500 600
ᮠဋ/Hz ᮠဋ/Hz
(c) ᫎ3 (104 snj105 snj106 s)፥ጪᝍ
图 3 不同时间段的维纳解
Fig. 3 Wiener solution at different times