
Page 17 - 《应用声学》2023年第2期
P. 17
第 42 卷 第 2 期 刘兢本等: 一种深度学习的立体阵波达方向估计方法 205
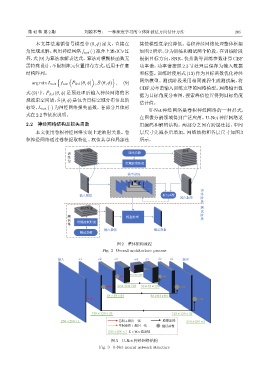
本文算法遵循信号模型中 (θ, ϕ) 定义,直接在 接使模型复杂度降低。卷积神经网络处理整体框架
角度域求解。利用神经网络f net (·)拟合上述dCv过 如图2所示,分为训练和测试两个阶段。在训练阶段
程,式(9)为算法求解表达式。算法对模糊核函数无 根据目标方向、SNR、快拍数等训练参数计算 CBF
需特殊设计,不限制阵元位置排布方式,适用于任意 功率谱,功率谱按照 2.3 节处理后保存为输入数据
结构阵列。 和标签。训练时使用式(13)作为目标函数优化神经
{ ( ) } 网络模型。测试阶段采用相同流程生成测试集,将
˜
˜
arg min L net f net P cbf (θ, ϕ) , S (θ, ϕ) , (9)
CBF功率谱输入训练完毕的网络模型。网络输出数
˜
式 (9) 中,P cbf (θ, ϕ) 是预处理后输入神经网络的常
据为目标角度分布图,搜索峰值位置得到目标角度
˜
规波束空间谱,S (θ, ϕ) 是包含目标空域分布信息的
估计值。
标签,L net {·}为神经网络损失函数。各部分具体形
U-Net 神经网络是卷积神经网络的一种形式,
式在2.2节依次说明。
在图像分割领域得到广泛应用。U-Net 神经网络采
2.2 神经网络结构及损失函数 用编码和解码结构。两部分之间有跨层连接,中间
本文使用卷积神经网络实现上述映射关系。卷 层尺寸先减小后增加。网络结构和各层尺寸如图 3
积神经网络通过卷积提取特征。权值共享和局部连 所示。
ᝫጷ ಖኤ
ᝫ ᝫጷԠ
ጷ
ᬷ
ฉౌॎੇ
വیᝫጷ
ᝫ
ᣥК ૯ܿѦ ጷ
ᣥКಖኤ
ត
ត
വیܫေ
ត ฉౌॎੇ
ᬷ
ᣥК ᣥѣ
តԠ
图 2 整体架构流程
Fig. 2 Overall architecture process
ᣥК e1 e2 e3 e4 d3 d2 d1 ᣥѣ
16f16f128
32f32f128 32f32f128
64f64f64 64f64f64
128f128f32 128f128f32
2 256f256f156f256f1 Ԅሥ+ॆʷӑ ᡵࡏᤌଌ 256f256f2
ቇศԄሥ+ॆʷӑ ༏ำѦ
256f256f1 ᫂fࠕfᤰ᥋
图 3 U-Net 神经网络结构
Fig. 3 U-Net neural network structure