
Page 21 - 《应用声学》2023年第2期
P. 21
第 42 卷 第 2 期 刘兢本等: 一种深度学习的立体阵波达方向估计方法 209
图 6(a)∼ 图 6(b) 为两个目标情况时水平向波 图6(b),俯仰角和水平角测向结果类似。后续图 7∼
束扫描结果,固定俯仰角为 96 。图6(c)∼图6(d)为 图8仅展示水平角估计情况,对俯仰角不再赘述。
◦
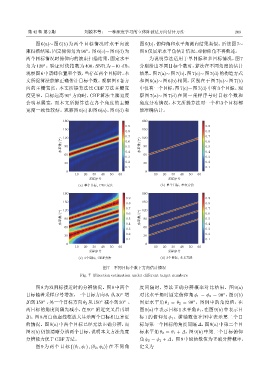
两个目标情况时俯仰向的波束扫描结果,固定水平 为说明算法适用于单目标和多目标情况,图 7
角为 120 。验证时快拍数为 400,SNR 为 −10 dB。 分别给出不同目标个数时,算法在不同角度的估计
◦
观察图 6中谱峰位置和个数,当存在两个目标时,本 结果。图7(a)∼图7(b)、图7(c)∼图7(d)的构造方式
文所提算法能够正确估计目标个数。观察图 6 各方 和图 6(a)∼ 图 6(b) 相同,区别在于图 7(a)∼ 图 7(b)
向的主瓣宽度,本文所提算法比 CBF 方法主瓣宽 中仅有一个目标,图7(c)∼图7(d)中有3个目标。观
度更窄。目标远离 90 方向时,CBF 算法主瓣宽度 察图 7(a)∼ 图 7(d) 在同一采样序号时目标个数和
◦
会明显展宽,而本文所提算法在各个角度的主瓣 角度分布情况,本文所提算法对一个和 3 个目标都
宽度一致性较好。观察图 6(c) 和图 6(a)、图 6(d) 和 能准确估计。
180 180
0.9 0.9
150 150
0.8 0.8
0.7 120 0.7
120
ඵࣱᝈ/(°) 90 0.6 ඵࣱᝈ/(°) 90 0.6
0.5
0.5
60 0.4 60 0.4
0.3 0.3
30 0.2 30 0.2
0.1 0.1
0 0
10 20 30 40 50 60 10 20 30 40 50 60
᧔ನऀՂ ᧔ನऀՂ
(a) ӭ˔ᄬಖ, CBFவข (b) ӭ˔ᄬಖ, వவข
180 180
0.9 0.9
150 150
0.8 0.8
0.7 120 0.7
120
ඵࣱᝈ/(°) 90 0.6 ඵࣱᝈ/(°) 90 0.6
0.5
0.5
60 0.4 60 0.4
0.3 0.3
0.2 0.2
30 30
0.1 0.1
0 0
10 20 30 40 50 60 10 20 30 40 50 60
᧔ನऀՂ ᧔ನऀՂ
(c) 3˔ᄬಖ, CBFவข (d) 3˔ᄬಖ, వவข
图 7 不同目标个数下方向估计情况
Fig. 7 Direction estimation under different target numbers
图 8 为双目标接近时的分辨情况。图 8 中两个 度间隔时,算法正确分辨概率对比结果。图 9(a)
目标随着采样序号增加,一个目标方向θ 1 从30 增 对比水平角时固定俯仰角 ϕ 1 = ϕ 2 = 90 ,图 9(b)
◦
◦
加到150 ,另一个目标方向θ 2 从150 减小到30 。 固定水平角 θ 1 = θ 2 = 90 。图例中的角度值,在
◦
◦
◦
◦
两目标的角度间隔先减小,在 90 附近交叉后再增 图 9(a) 中表示目标 1 水平角 θ 1 ,在图 9(b) 中表示目
◦
加。图 8 用白色虚线框放大显示两个目标相互靠近 标 1 的俯仰角 ϕ 1 。横轴数值在图中表示第二个目
的情况。图 8(a) 中两个目标已经无法正确分辨,而 标与第一个目标的角度间隔 ∆,图 9(a) 中第二个目
图8(b) 仍能清晰分辨两个目标,说明本文方法角度 标水平角 θ 2 = θ 1 + ∆,图 9(b) 中第二个目标俯仰
分辨能力优于CBF方法。 角 ϕ 2 = ϕ 1 + ∆。图 9 中纵轴数值为正确分辨概率,
图 9 为两个目标 {(θ 1 , ϕ 1 ) , (θ 2 , ϕ 2 )} 在不同角 定义为