
Page 185 - 《应用声学)》2023年第5期
P. 185
第 42 卷 第 5 期 闫啸林等: 基于道路限速策略的规划路网噪声控制 1077
1.0 值为 55.55 dB,降低噪声值为 9.16 dB,降低效
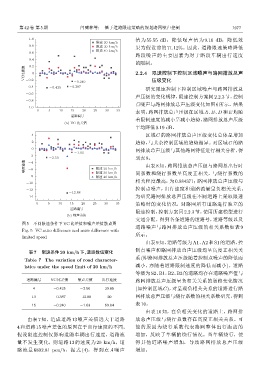
ᬍᤴ 20 km/h
0.8 ᬍᤴ 30 km/h 果为假设前的 71.12%。因此,道路限速策略降低
ᬍᤴ 40 km/h
0.6
路段噪声的主要因素为对于路段车辆出行速度
0.4
的限制。
0.2
VCඋࣀϙ 0 2.2.4 限速控制下控制区域噪声与路网排放总声
-0.2
-0.240 压级变化
-0.4 -0.425 -0.387
研究限速控制下控制区域噪声与路网排放总
-0.6
声压级的变化规律,限速控制方案同 2.2.3 节,控制
-0.8
点噪声与路网排放总声压级变化如图 6 所示。结果
-1.0
0 5 10 15 20 25 30 35
表明,路网排放总声压级在区域 A、B、D 和 E 均随
᥋ᎄՂ
着限制速度的减小呈减小趋势,路网排放总声压级
(a) VC උࣀϙ
平均降低0.19 dB。
4 区域 C 的路网排放总声压级变化总体呈增加
2 趋势,与其余控制区域的趋势相异。对区域 C 的路
0 网排放总声压级与其他路网特征进行相关分析,得
-1.03
-2
-2.50 到表8。
٪ܦࣀϙ -4 ᬍᤴ 20 km/h 由表 8 知,路网排放总声压级与路网总出行时
-6
-8 ᬍᤴ 30 km/h 间系数和绕行系数呈高度正相关,与绕行系数的
ᬍᤴ 40 km/h
相关程度最高,为 0.984371;路网排放总声压级与
-10
-12 控制点噪声,出行速度和道路流量呈负相关关系。
-12.88
-14 为研究路网排放总声压级在不同道路上采取限速
0 5 10 15 20 25 30 35 策略时的变化情况,对路网所有道路进行独立的
᥋ᎄՂ
限速控制,控制方案同 2.2.3 节,使用所建模型进行
(b) ٪ܦࣀϙ
交通分配。得到各条道路的道路号,道路等级以及
图 5 不同限速条件下 VC 比差值和噪声差值散点图
道路噪声与路网排放总声压级的相关系数如表 9
Fig. 5 VC ratio difference and noise difference with
所示。
limited speed
由表 9 知,道路等级为 A1、A2 和 S1 的道路,控
制点噪声和路网排放总声压级均呈高度正相关关
表 7 限速条件 20 km/h 下,道路数值变化
系 (即路网排放总声压级随着控制点噪声的降低而
Table 7 The variation of road character-
istics under the speed limit of 20 km/h 减小,亦随着道路限制速度的降低而减小)。道路
等级为 S2、B1,B2、B3 的道路均存在道路噪声值与
道路编号 VC 比差值 噪声差值 出行速度 路网排放总声压级呈负相关关系的道路变化情况
4 −0.425 −2.50 39.85 (如控制区域 C),对呈现负相关关系的道路进行路
13 −0.387 −12.88 20 网排放总声压级与绕行系数的相关系数研究,得到
15 −0.240 −1.03 59.04 表 10。
由表 10 知,在负相关变化的道路上,路网排
由表 7 知,造成道路 13 噪声差值远大于道路 放总声压级与绕行系数存在高度正相关关系。可
4 和道路 15 噪声差值的原因在于出行速度的不同。 能的原因为绕行系数代表路网整体出行距离的
假设限速控制仅影响道路车辆出行速度,道路流 增加,反映了车辆的绕行情况。当车辆绕行,使
量不发生变化,则道路 13 的速度为 20 km/h,道 得其他道路噪声增加,导致路网排放总声压级
路流量 6802.81 pcu/h,据式 (4),得到点 A 噪声 增加。