
Page 182 - 《应用声学)》2023年第5期
P. 182
1074 2023 年 9 月
N10
A
(13,193,S1)
N4 (14,195,S2) (15,416,A1)
(4,157,S2) (7,111,S2) (25,173,B3) N17
(18,114,S2) N14
N2 (5,125,S2) (16,174,S2) (30,243,A1)
(9,118,S2) N7
N11
E N5 (24,96,B2) (29,136,S2) N20
(1,169,S1) (11,120,B2) C (17,95,S2) (21,122,B3) (27,164,B3) (32,202,B3) (34,128,A2)
D
(19,168,B3) N15
N1 (3,245,S2) N12 N18 N21
N8 (20,113,S2) (26,131,B2) B
(33,227,S1)
(8,250,S2)
(2,235,B1)
(23,124,B1)
(31,176,S2)
(22,166,B1) (28,236,B1)
(12,84,B2)
(10,127,B1) N9 N13 N16
N3 (6,113,B1) N19
N6
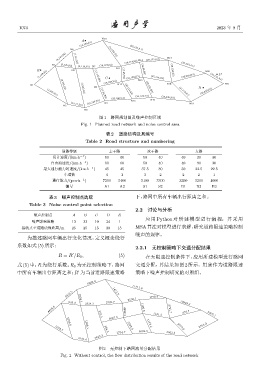
图 1 路网规划图及噪声控制区域
Fig. 1 Planned road network and noise control area
表 2 道路结构及其编号
Table 2 Road structure and numbering
道路等级 主干路 次干路 支路
设计速度/(km·h −1 ) 60 60 50 40 40 30 30
自由流速度/(km·h −1 ) 60 60 50 40 40 30 30
最大通行能力时速度/(km·h −1 ) 45 45 37.5 30 30 22.5 22.5
车道数 4 3 3 2 2 2 1
通行能力/(pcu·h −1 ) 7200 5400 5100 3300 3200 3200 1600
编号 A1 A2 S1 S2 B1 B2 B3
表 3 噪声控制点选取 下,路网中所有车辆出行距离之和。
Table 3 Noise control point selection
2.2 讨论与分析
噪声控制点 A B C D E
应用 Python 对所建模型进行编程,并采用
噪声影响道路 13 33 19 34 1
接收点至道路边缘距离/m 25 25 15 30 15 MSA算法对模型进行求解,研究道路限速策略控制
噪声的规律。
为描述路网车辆出行变化情况,定义概念绕行
系数如式(5)所示:
2.2.1 无控制策略下交通分配结果
′
R = R /R 0 , (5) 在无限速控制条件下,应用所建模型进行路网
式 (5) 中:R 为绕行系数;R 0 为无控制策略下,路网 交通分配,其结果如图 2 所示。用来作为道路限速
中所有车辆出行距离之和;R 为当前道路限速策略 策略下噪声控制研究的对照组。
′
6802.8 11711.9
5431.0 1472.7 1718.9
2199.1
849.4 2709.7 10848.3
2059.1
2524.3
4418.5 4992.5 1190.5 3791.7
1141.2 437.7 5405.1
2067.3
971.5
2754.2
1076.8
1178.4
1869.1
3777.0
2898.9
1079.7
2754.7 3002.3 3002.5
888.5
3829.2
3341.4
图 2 无控制下路网流量分配结果
Fig. 2 Without control, the flow distribution results of the road network