
Page 129 - 《应用声学》2023年第6期
P. 129
第 42 卷 第 6 期 唐少杰等: 非均匀流体介质内部散射声场重建的逐层计算方法 1239
联立式(15)、式(16)解得: 运行内存为 16 GB。为得到更直观的结果,直接对
( −1 ) −1 比ROI区域的散射场分布。因逐层算法需获取检测
p B = E + C B C B H o B − B B o B
H 面信息作为已知量用于求解,检测面上测点的散射
[ −1 ]
× p inB + C B C (p H − p inH ) . (17)
H 场由MoM得到。
逐层算法优势不仅在于可以减小矩阵规模,而 入射声压、ROI区域相关参数如表1所示。
且能减小数据检测规模。在 MoM 中,声源外部散 表 1 中 所 给 ROI 区 域 单 元 划 分 基 于 极 坐 标
射方程组通常表示发射器从某一个方向上发射超 系,第 n 层任意单元节点周向坐标为 r = a − nl,
声波所对应的方程组,一般情况下检测阵列点数 H n = 1, 2, 3, · · · ;第 n 层中第 m 个单元节点径向坐标
小于 ROI 区域总单元数 M × (N − 1) + 1,此时式 为θ = 2mπa/l, m = 1, 2, 3, · · · ;结合上述ROI区域
为关于像函数 o的欠定方程组,为使其可解,需从 Φ 划分方法及表 1 给出的入射声压相关参数,任意场
个方向上发射超声波,得到 Φ × H 个散射方程,使 点处入射声压可表示为
[Φ × H] > M × (N − 1) + 1,此时方程组虽然可解, −ik∥r∥ cos θ
p in = e , (18)
但也极大地扩充了矩阵规模与检测规模;逐层算法
式 (18) 中,r 为场点的位置向量,θ 为 r 与 x 轴正方
则不需通过上述方案补全不充分的检测阵列数据,
向的夹角。
因一次仅计算一层单元,轻易满足H > M。
对上述 8 种模型设置不同的介质分布进行仿
3 仿真 真,绘制ROI区域散射声压云图,如图3所示。
相较于 MoM 一次性求解全部单元的未知量,
为验证 “逐层算法” 是否能够正确重建流体介 逐层算法的优势主要在于将求解域分层后逐次计
质内部声场分布,本文对 8 种模型进行仿真,将 “逐 算,进而可减小计算机内存消耗,并降低对计算机
层算法”与MoM得到的计算结果进行对比。在仿真 的算力要求。如表 2 所示,以模型 7、模型 8 为例,给
时,仿真软件采用 MATLAB R2021a;计算机处理 出了逐层算法计算一层占用内存与 MoM 计算占用
器为Intel(R) Core(TM) i7-10700 CPU@2.90 GHz, 内存。
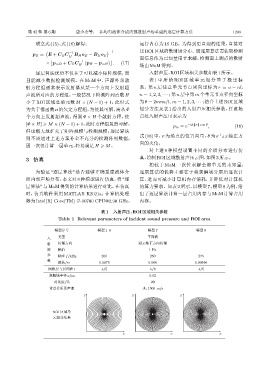
表 1 入射声压、ROI 区域相关参数
Table 1 Relevant parameters of incident sound pressure and ROI area
模型序号 模型 1–6 模型 7 模型 8
类型 平面波
入
射 传播方向 沿 x 轴正方向传播
波 幅值 1 Pa
参 频率 f/kHz 200 250 275
数
波长/m 0.0075 0.006 0.00546
网格层与层间距 l λ/5 λ/6 λ/5
求解域半径 a/m 0.02
对比度/% 20
背景介质及声速 水,1500 m/s
y y y
ROI 区域单
元划分结果
x x x