
Page 127 - 《应用声学》2023年第6期
P. 127
第 42 卷 第 6 期 唐少杰等: 非均匀流体介质内部散射声场重建的逐层计算方法 1237
解计算层声场的关键在于表示未离散区域声源对 2.2 离散模型描述
计算层单元处的声场。因近场声全息技术可以匹配 逐层算法采用声全息的声场重构原理,为保证
检测面上的信息重建声源外部声场,且无论是边界 声场重建的稳定性,应将虚拟边界 S 、声源边界 S 0
′
元法 (Boundary element method, BEM) 还是波叠 与检测边界设置H 为共形,又因检测边界常为圆形,
加法 (Wave superposition method, WSM) 均可将 所以本文将 ROI区域、虚拟边界与检测边界均设置
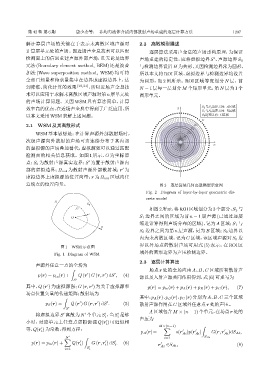
全部已知量和待求量集中在边界或虚拟边界上,达 为圆形,如 2 图所示。ROI 区域等宽划分 N 层,前
到降维、简化计算的效果 [19,21] ,所以近场声全息技 N − 1 层每一层划分 M 个矩形单元,第N 层为 1 个
术可以应用于求解未离散区域声源对第n层单元处 圆形单元。
的声场计算问题。又因 WSM 具有算法简单、计算
效率高的优点,在近场声全息中得到了广泛应用,所 y S ˁS ႍ˨ᫎ. Aӝ۫
S ˁS ႍ˨ᫎ. Bӝ۫
以本文采用WSM求解上述问题。 S ႍ̿Я. Cӝ۫
H
2.1 WSM及其离散形式 S
S
WSM 基本思想是:在计算声源外部散射场时, S
Sϕ
次级声源向外散射的声场可由连续分布于其内部
x
的虚拟源的声场叠加替代,虚拟源强可以通过匹配
检测面的相关信息获取。如图 1 所示,O 为坐标原
点;S 0 为散射声源真实边界;S 为置于散射声源内
′
部的虚拟边界;Ω out 为散射声源外部散射域;r 为
′
虚拟边界上虚拟源的位置向量;r 为 Ω out 区域内任
意场点的位置向量。 图 2 逐层算法几何离散模型示意图
Fig. 2 Diagram of layer-by-layer geometric dis-
crete model
Ω
S
S ϕ 如图2所示,将ROI区域划分为3个部分,S 2 与
rϕ S 1 边界之间的区域为前 n − 1 层声源 (已通过逐层
O
缩进计算得到声场分布的区域),记为 A 区域;S 1 与
r
S 0 边界之间为第 n 层声源,记为 B 区域;S 0 边界以
内为未离散区域,记为 C 区域,该区域声源对 S 0 边
界以外场点的散射声场可用式 (5) 表示;在 ROI 区
图 1 WSM 示意图
域外的圆形边界为声压检测边界。
Fig. 1 Diagram of WSM
2.3 逐层计算算法
声源外任意一点的全场为
场点 r 处的全场应由 A、B、C 区域所有散射声
∫
′
′
′
p(r) = p in (r) + Q (r ) G (r, r ) dS , (4) 源以及入射声源共同作用得到,式(6)可重写为
S ′
其中,Q (r ) 为虚拟源强;G (r, r ) 为关于虚拟源和 p(r) = p in (r) + p A (r) + p B (r) + p C (r), (7)
′
′
场点位置矢量的传递矩阵;散射场为
其中,p A (r)、p B (r)、p C (r) 分别为A、B、C 三个区域
∫
′
′
′
p S (r) = Q (r ) G (r, r ) dS . (5) 散射声源作用在C 区域外任意点r 处的声压。
S ′
A区域包含M × (n − 1)个单元,在场点r 处的
将虚拟边界 S 离散为 N 个单元 S ,当 S 足够
′
′
′
′
i
i
小时,对应单元上任意点虚拟源强 Q(r ) 可近似相 声压为
′
i
M×(n−1) ∫
等,Q(r )为常数,得到方程: ∑ ′ ′ ′
′
i
p A (r)=
o(r )p(r )
Ai Ai G(r, r )dS Ai ,
Ai
N ′ ∫ i=1 S Ai
∑
p(r) = p in (r) + Q(r ) G (r, r ) dS . (6) r ′ ∈S Ai , (8)
′
′
′
i
i
i
S ′ Ai
i=1 i