
Page 184 - 《应用声学》2025年第2期
P. 184
444 2025 年 3 月
采样率∆ 2 = λ − 1。FTN符号解压缩过程相当于一 译码器,两者互相传递另一方未知的外部信息来提
个针对FTN非正交干扰的预均衡器,但依然会存在 升均衡性能,中间的交织 (Π) 和解交织 (Π −1 ) 对应
一定的残余符号干扰和噪声,与水声信道存在的干 发射端编码调制过程中的交织,用来消除相邻比特
扰相互混叠,则离散接收信号可以表示为 的相关性,最后一次Turbo迭代后输出译码结果b。
ˆ
2L−1
∑
y n = h i ¯x n−i + w n , n=0, 1, · · · , 2N − 1, (3)
2 MQAM-FTN接收机设计
i=0
式 (3) 中,h = [h 0 , h 1 , · · · , h 2L−1 ] 表示混合等效信
为实现 MQAM-FTN 水声通信,接收机需要对
道冲激响应系数,w n 表示混合等效复高斯白噪声采
多普勒时频偏移和 ISI 有效补偿。本文所提接收机
样。消除训练序列对符号序列的干扰 [18] ,将式 (3)
写成矩阵形式的系统模型: 先利用 SICTE方法估计每个 FTN 符号的多普勒定
时偏移量,并进行重采样和相位补偿,再利用 NR-
y = H ¯ x + w, (4)
VAMP-CETE 补偿由 FTN 信号压缩解压缩以及水
T 2N
其中,y = [y 0 , y 1 , · · · , y 2N−1 ] ∈ C 表示接收
声信道多径效应引入的 ISI 失真,从接收信号中恢
信号向量,H ∈ C 2N×2N 为基于等效信道冲激响
复发射信号。
应 h 的循环信道矩阵,w = [w 0 , w 1 , · · · , w 2N−1 ] ∈
)
(
C 2N ∼ CN 0, β −1 I 为复高斯白噪声矩阵,β w 为 2.1 多普勒估计和补偿
w
噪声精度,即信道噪声方差的倒数。循环矩阵可
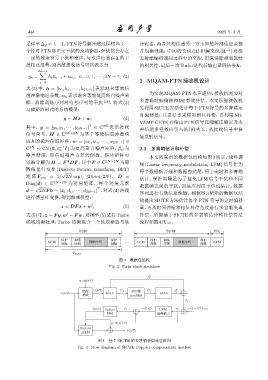
本文所采用的数据包结构如图 3 所示,线性调
以被分解为 H = F DF ,其中 F ∈ C 2N×2N 为离
H
频 (Linear frequency modulation, LFM) 信号作为
散傅里叶变换 (Discrete Fourier transform, DFT)
√ 每个数据帧开端和数据包结尾,用于定时和多普勒
矩 阵 F mn = 1/ 2N exp (−j2πmn/2N), D =
估计;保护间隔是为了避免 LFM 信号干扰和不同
Diag(d) ∈ C 2N×2N 为对角矩阵,每个对角元素
√ T 数据帧之间的干扰;训练序列用于信道估计;数据
d = 2NF h = [d 0 , d 1 , · · · , d 2N−1 ] ,对式 (4) 两端
序列进行有效信息传输。根据图 3 所示的数据包结
进行傅里叶变换,得到频域模型:
构提出SICTE方法估计每个FTN 符号的定时偏移
′
z = DF ¯ x + w , (5) 量,再从时间伸缩和相位补偿角度进行多普勒失真
式(5)中,z = F y,w = F w。对模型(5)进行Turbo 补偿。所提基于 SICTE 的多普勒估计和补偿算法
′
频域均衡处理,Turbo 均衡包含一个软均衡器与软 流程如图4所示。
ኄ1ࣝ ኄF ࣝ ፇࡋ
δઐ ᝫጷ δઐ δઐ ᝫጷ δઐ
LFM ऀѵ ... LFM ऀѵ LFM
ᫎᬦ ऀѵ ᫎᬦ ᫎᬦ ऀѵ ᫎᬦ
T frame
图 3 数据包结构
Fig. 3 Data block structure
k
t f
s LFM↼nT↽
~ p
Ӝᦡ C↼kT↽ C f ᄱТ C f t f
r↼nT↽ MAX MAX
ᄱТ sincଣϙ
t f
⌣ τ↼nT↽ Spline τ f ⌣ −θ↼τ f ↽ LFM τ f ֓↼f֓↽T frame
ଣϙ Ϡࣀξ
e -j2pf 0 ⌣ τ ↼nT↽
Farrow
᧘᧔ನ ⌣ r↼nT↽
图 4 基于 SICTE 的多普勒补偿流程框图
Fig. 4 Flow diagram of SICTE Doppler compensation method