
Page 175 - 《应用声学》2025年第3期
P. 175
第 44 卷 第 3 期 李健等: 利用水下滑翔机的深海影区声源深度估计 709
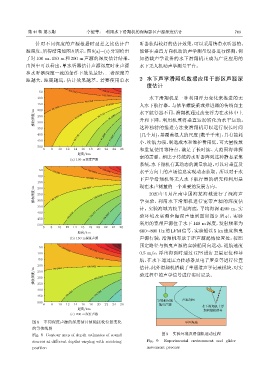
针对不同深度的声源根据时延差之比估计声 听器获得较好的估计效果,可以采用携带水听器的、
源深度,所得结果如图 8所示,图8(a)∼(c)分别给出 能够在垂直方向机动的声学测量设备进行探测,例
了对 100 m、150 m 和 200 m 声源的深度估计结果。 如搭载声学设备的水下滑翔机正成为广泛应用的
由图中可以看出,单水听器估计声源深度时在声源 水下无人机动声学测量平台。
和水听器深度一致的条件下效果最好,二者深度差
距越大,距离越远,估计效果越差。若要使用单水 2 水下声学滑翔机数据应用于影区声源深
度估计
50 102.3333 106.54
102.3333
100 水下滑翔机是一种利用浮力变化来推进的无
98.1266
150 93.9199 人水下航行器。与依靠螺旋桨或推进器的传统自主
98.1266 水下航行器不同,滑翔机通过改变浮力在水体中上
ଌஆງए/m 250 93.9199 89.7132 85.5065 升和下降,利用机翼将垂直运动转化为水平运动。
200
300
350 这种独特的推进方法使滑翔机可以运行很长时间
400 81.2998 (几个月),并覆盖很大的尺度(数千千米),具有能耗
450 89.7132 77.0931
小、续航力强、制造成本和维护费用低、可大量投放
500
6 8 10 12 14 16 18 20 22 24 26 和重复使用等特点,满足了长时续、大范围海洋探
ᡰሏ/km
索的需要。相比于传统的水听器阵列这种静态采集
(a) 100 mງएܦູ
系统,水下翔机有其动态的测量轨迹,可以对垂直及
50
水平方向上的声场信息实现动态获取。所以对于水
166.6387
159.8624
153.086
100
下声学滑翔机等无人水下航行器的研究和利用是
153.086
150 现在水声测量的一个重要的发展方向。
ଌஆງए/m 250 146.3097 146.3097 139.5334 学实验,利用水下滑翔机进行宽带声源的深度估
200
2020 年 5 月在南中国海某海域进行了深海声
300
350
计。实验海域为较平坦海底,平均海深 4290 m,实
400 139.5334 132.757 验环境及实测全海深声速剖面如图 9 所示,实验
450 125.9807
采用的宽带声源位于水下 140 m 深度,发射频率为
500
6 8 10 12 14 16 18 20 22 24 26
600∼800 Hz 的 LFM 信号,实验船以 5 kn 速度拖曳
ᡰሏ/km
(b) 150 mງएܦູ 声源行驶,滑翔机布放于距声源起始位置处,按照
预定路径与拖曳声源的实验船同向运动,巡航速度
50 208.5842 218.2102 227.8362
100 0.5 m/s,浮出海面时通过 GPS 进行卫星定位和导
150 208.5842 航,在水下通过压力传感器及电子罗盘等进行位置
200 198.9582 198.9582 估计,此外滑翔机搭载了单通道声学记录模块,对实
ଌஆງए/m 250 189.3322 验过程中的声学信号进行实时记录。
300
350
400
450 189.3322 179.7062
ࠄᰎᓕՎஊ ܦᤴҖ᭧
500
6 8 10 12 14 16 18 20 22 24 26 ફఝܦູ ඵʾᏕʽ๏
ᡰሏ/km
రᫎଌஆηՂ
(c) 200 mງएܦູ
图 8 不同深度声源的深度估计值随接收位置变化 ࣱڻ๒अ
的等值线图
Fig. 8 Contour map of depth estimates of sound 图 9 实验环境及滑翔机运动过程
sources at different depths varying with receiving Fig. 9 Experimental environment and glider
position movement process