
Page 177 - 《应用声学》2025年第3期
P. 177
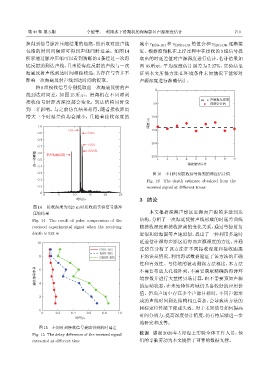
第 44 卷 第 3 期 李健等: 利用水下滑翔机的深海影区声源深度估计 711
换得到信号脉冲压缩结果的包络,然后取对应声线 减小 τ BSR-BR 和 τ SBSR-BR 的值会和 τ SBR-BR 逐渐接
包络的时间间隔即可得到声线间时延差。如图 14 近。根据滑翔机在上浮过程中在接收的 9 组信号提
所示通过脉冲压缩可以看到清晰的 4 条经过一次海 取出的时延差值对声源深度进行估计,估计结果如
底反射的到达声线,且未经海底反射的声线与一次 图 16 所示,平均深度估计误差为 7.27%,实验结果
海底反射声线到达时间相距较远,其存在与否并不 证明本文所提方法在环境条件未知情况下能够对
影响一次海底反射声线到达时间的提取。 声源深度进行准确估计。
将9 组接收信号分别提取出一次海底反射的声
0
线到达时间差,如图 15 所示。滑翔机在不同时刻
ܦູફఝງए
接收信号时距离深度都会变化,到达结构同时受 50 ງएͥᝠϙ
到二者影响。与之前仿真结果相符,随着接收距离
增大三个时延差值均会减小,且随着接收深度的 100
ງए/m
1.0
BR 150
0.9 SBR
0.8
200
BSR
0.7
SBSR
ॆʷӑࣨϙ 0.5 250 1 2 3 4 ଌஆηՂऀՂ 6 7 8 9
0.6
ళፃ๒अԦ࠱
5
0.4
0.3 图 16 不同时刻接收信号得到的深度估计值
0.2 Fig. 16 The depth estimate obtained from the
0.1 received signal at different times
0
0 5 10 15 20 25
3 结论
ᫎ/s
图 14 接收深度为 523 m 时接收的实验信号脉冲
压缩结果 本文根据深海声影区近海面声源的多途到达
Fig. 14 The result of pulse compression of the 结构,分析了一次海底反射声线形成的时延差曲线
received experimental signal when the receiving 随接收深度和接收距离的变化关系,通过等掠射角
depth is 523 m 近似和近海面等声速近似,提出了一种利用多途时
10 延差估计深海声影区近海面声源深度的方法,并通
SBR-BR 过仿真分析了该方法在不同接收深度和接收距离
BSR-BR
8 SBSR-BR 下的误差情况,利用海试数据验证了该方法的正确
性和有效性。与传统的被动测深方法相比,本方法
ଌஆηՂऀՂ 4 不需要布放大孔径阵列,不需要获取精确的海洋环
6
境参数并进行大量拷贝场计算,也不需要预知声源
的运动状态,在未知特性海域仍具备较好的应用价
值。但当声场中存在多个声源目标时,不同声源形
2
成的声线时间到达结构相互叠加,会导致该方法的
目标定位性能下降或失效。对于未知信号如何提高
0
0 0.2 0.4 0.6 0.8 1.0
时间分辨力,提高深度估计精度,仍有待后续进一步
ᫎ/s
地研究和改善。
图 15 不同时刻接收信号提取得到的时延差
致谢 感谢 2020 年 5 月海上实验全体工作人员,他
Fig. 15 The delay difference of the received signal
extracted at different time 们的辛勤劳动为本文提供了可靠的数据支撑。