
Page 176 - 《应用声学》2025年第3期
P. 176
710 2025 年 5 月
水下滑翔机本身没有动力系统,当水下滑翔机 0.02
ᓑࢺͻ٪ܦ
改变浮力和重心时其机械结构将不可避免地产生 ᓑࢺͻ٪ܦ
相应的自噪声,在此有必要分析水下滑翔机的自噪 0.01
声,了解自噪声对于接收信号的影响。水下滑翔机
的自噪声特点主要分为两部分,首先油泵电机工作 ႃԍ/V 0
使得水下滑翔机在海面开始剖面测量时减少浮力
得以下潜,在工作剖面的底部增加浮力得以上升,由 -0.01
此产生油泵噪声;其次水下滑翔机受到海流的影响
而偏离方位时,舵电机运转,使其回归预设运动方
-0.02
位,由此产生舵电机噪声。在滑翔机进行水下测量 0 5 10 15 20 25 30
ᫎ/s
时,主要的自噪声为舵电机噪声,同时还会受到流噪
声和环境噪声等影响。 图 11 滑翔机工作时的自噪声波形
图 10 中可以看到此滑翔机在低频 100 Hz 以 Fig. 11 Time domain waveform of self-noise in
glider motion
下范围内的噪声谱级比垂直阵更低,在 400 Hz 以
上部分则会比垂直阵测得的噪声谱级高 10 dB 以 dB/Hz
4000
上,存在舵机工作时噪声干扰频率范围主要在
100
100 ∼ 600 Hz 以及 3000 Hz 附近,但总体影响较小
且在滑翔过程中间歇性出现,在较高的信噪比环境 3000 80
下基本可以忽略。图 11 和图 12 分别画出了滑翔机
工作时噪声时域波形和时频谱。 ᮠဋ/Hz 2000 60
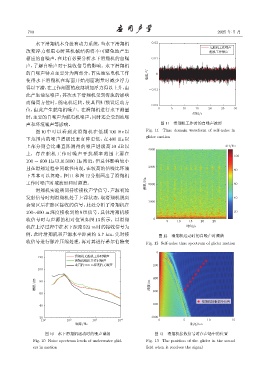
滑翔机实验期间持续接收声学信号,声源初始
发射信号时刻滑翔机处于上浮状态,取滑翔机脱离 40
1000
会聚区后在影区接收的信号,此处分析了滑翔机在
100∼600 m 深度接收到的 9 组信号,具体滑翔机接 20
收信号时与声源的相对位置如图 13 所示。以滑翔 0 5 10 15 20 25
机在上浮过程中在水下深度523 m时的接收信号为 ᫎ/s
例,此时滑翔机和声源水平距离约 5.7 km,先对接 图 12 滑翔机运动时的自噪声时频谱
收信号进行脉冲压缩处理,再对其进行希尔伯特变 Fig. 12 Self-noise time spectrum of glider motion
0
120 Ꮥᓑࢺͻ٪ܦ
Ꮥᓑࢺͻ٪ܦ
ۇᄰ188 mງएЋ٪ܦ 200
100
400
៨ጟ/dB ງए/m
80
60 600
ᏕଌஆηՂͯᎶ
40 800
20 1000
10 1 10 2 10 3 10 4 0 5 10 15
ᮠဋ/Hz ᡰሏ/km
图 10 水下滑翔机运动时的噪声谱级 图 13 滑翔机接收信号时在声场中的位置
Fig. 10 Noise spectrum levels of underwater glid- Fig. 13 The position of the glider in the sound
ers in motion field when it receives the signal