
Page 21 - 201805
P. 21
第 37 卷 第 5 期 郭良浩等: 波导不变量误差对频域 β-warping 变换及浅海被动测距的影响 603
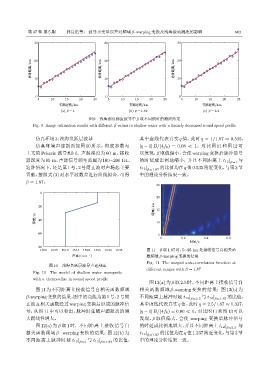
30 30 30
ͥᝠᡰሏ/km 20 ͥᝠᡰሏ/km 20 ͥᝠᡰሏ/km 20
10
10
10
0 0 0
5 10 15 20 25 5 10 15 20 25 5 10 15 20 25
ࠄᬅᡰሏ/km ࠄᬅᡰሏ/km ࠄᬅᡰሏ/km
(a) β=1 (b) β=1.59 (c) β=2.2
图 9 浅海弱负梯度波导中 β 取不同值时的测距结果
Fig. 9 Range estimation results with different β values in shallow water with a linearly decreased sound speed profile
仿真环境3:浅海负跃层波导 其中虚线代表真实 q 值,此时 q = 1/1.87 ≈ 0.535,
仿真环境声速剖面如图 10 所示,海底参数与 |q − 1| B/(4f 0 ) = 0.08 ≪ 1。对比图 11 和图 12 可
上文的 Pekeris 波导相同。声源深度为 60 m,接收 以发现,β 取值偏小,会使 warping变换后脉冲信号
器深度为 65 m,声源信号频率范围为 100∼200 Hz。 的时延成比例地缩小,并且不同距离上 t 12 | 与
β=1
这种情况下,还是第 1 号、2 号简正波对声场起主要 t 12 | 的比值均在q 值0.535附近变化,与第3节
β=1.87
贡献,按照式 (3) 对水平波数差进行曲线拟合,可得 中的理论分析结果一致。
β = 1.87。
25
0
20
ᡰሏ/km 15
20
ງए/m 40 10
60
5
0 0.2 0.4 0.6
ᫎ/s
80
1500 1505 1510 1515 1520 1525 1530 1535 图 11 β 取 1.87 时,5∼25 km 处接收信号自相关函
ܦᤴ/(mSs -1 ) 数频域 β-warping 变换的结果
Fig. 11 The warped auto-correlation function at
图 10 浅海负跃层波导声速剖面
different ranges with β = 1.87
Fig. 10 The model of shallow water waveguide
with a thermocline in sound speed profile
图 13(a) 为 β 取 2.5 时,不同距离上接收信号自
图 11 为不同距离上接收信号自相关函数频域 相关函数频域 β-warping 变换的结果;图 13(b) 为
β-warping变换的结果,图中的亮线为第1号、2号简 不同距离上脉冲时延 t 12 | 与 t 12 | 的比值,
β=2.5 β=1.87
正波互相关函数经过 warping变换后形成的脉冲信 其中虚线代表真实 q 值,此时 q = 2.5/1.87 ≈ 1.337,
号,从图 11 中可以看出,脉冲时延随声源距离的增 |q − 1| B/(4f 0 ) = 0.06 ≪ 1。对比图11和图13可以
大而线性增大。 发现,β 取值偏大,会使 warping 变换后脉冲信号
图 12(a) 为 β 取 1 时,不同距离上接收信号自 的时延成比例地增大,并且不同距离上 t 12 | 与
β=2.5
相关函数频域 β−warping 变换的结果;图 12(b) 为 t 12 | 的比值均在q 值1.337附近变化,与第3节
β=1.87
不同距离上脉冲时延 t 12 | 与 t 12 | 的比值, 中的理论分析结果一致。
β=1 β=1.87