
Page 50 - 201901
P. 50
46 2019 年 1 月
的自适应设计算法,该算法在获取降噪性能的同时,
0 引言 能有效调节水床效应引起的噪声放大。
随着经济、社会的快速发展,噪声污染已成为 1 调节水床效应的频域自适应算法
一大严峻的环境问题 [1−3] 。有源噪声控制 (Active
noise control, ANC) 是一种通过主动产生的次级 1.1 自适应反馈有源噪声控制系统
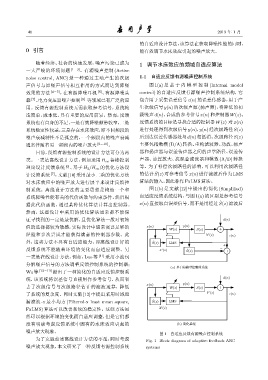
声信号与原噪声信号相互作用的方式而达到降噪 图 1(a) 是 基 于 内 模 型 控 制 (Internal model
效果的方法 [4−5] ,在有源降噪耳机 [6] 、有源降噪头 control) 的自适应反馈有源噪声控制系统结构,它
靠 [7] 、电力变压器噪声控制 [8] 等领域已有广泛的应 包含用于采集误差信号 e(n) 的误差传感器,用于产
用。反馈有源控制系统无需获取参考信号,系统构 生次级信号 y(n) 的次级声源 (扬声器),待降低的初
造简单,成本低,具有重要的应用前景。然而,反馈 级噪声 d(n),合成的参考信号 x(n) 和控制器 W(z)。
系统也有自身的不足,一是有效降噪频带较窄,二是 反馈系统的目标是寻找合适的控制器W(z) 对x(n)
系统稳定性较差,三是存在水床效应,即不同频段的 进行处理得到次级信号 y(n),y(n) 经次级路径 S(z)
噪声衰减特性不是孤立的,一个频段内的噪声衰减 后到达误差传感器处与d(n)相抵消。次级路径S(z)
通常伴随着另一频段内的噪声放大 [9−10] 。 主要包括数模 (D/A) 转换、重构滤波器、功放、扬声
目前,反馈有源控制系统的设计方法可分为两 器和扬声器与误差传声器之间的声学路径、误差传
类。一类是离线设计方法,例如运用 H ∞ 鲁棒控制 声器、前置放大、抗混叠滤波器和模数 (A/D) 转换
理论设计反馈系统 [6] 、基于 H 2 /H ∞ 的优化方法设 等。为了补偿次级路径的影响,可以利用次级路径
ˆ
计反馈系统 [7] ,文献 [10] 采用最小二乘的优化方法 的估计 S(z) 对参考信号 x(n) 进行滤波后作为 LMS
对水床效应中的噪声放大进行展平来设计反馈控 算法的输入,因此称作FxLMS算法。
制系统。离线设计方法的主要思想是构造一个和 图 1(b) 是文献 [12] 中提出的简化 (Simplified)
系统降噪性能有关的代价函数与约束条件,然后根 自适应反馈系统结构,与图 1(a) 的区别是参考信号
ˆ
据此代价函数,通过某种优化算法计算出控制器。 x(n)直接取自误差信号,而不是用经过S(z)滤波后
然而,这些设计中采用的优化算法通常都不能保
证寻找到的一定是最优解,且优化算法一般对初始 d↼n↽
值的选择都较为敏感,实际设计中通常需要足够的 x↼n↽ y↼n↽
W↼z↽ S↼z↽ ⇁
经验和多次尝试才能获得满意的控制器参数。此 Y ϕ↼z↽ e↼n↽
外,这类方法不具有自适应能力,即离线设计好的 S↼z↽ LMS
⌣
⇁
反馈系统不能随着环境的变化而自适应调整。另 Xϕ↼z↽ S↼z↽ ֓ ⇁
⌣
一类是在线设计方法,例如,Luo 等 [11] 采用小波包
分解噪声信号的方法调整反馈控制系统的控制器;
(a) ۳̆Яവی҄ᄊጇፒ
Wu 等 [12−13] 提出了一种简化的自适应反馈控制系
统,该系统将误差信号直接用作参考信号,从而省 d↼n↽
去了次级信号与次级路径估计的滤波运算,降低 x↼n↽ W↼z↽ y↼n↽ S↼z↽ ⇁
了系统的复杂度。同时文献 [12] 中提出采用时域泄 Y ϕ↼z↽ e↼n↽
⌣
漏滤波 -x 最小均方 (Filtered-x least mean square, S↼z↽ LMS
FxLMS) 算法可以改善系统的稳定性。这些方法虽 Xϕ↼z↽
然可以根据环境的变化而自适应调整,但是它们都
没有明确考虑反馈系统中固有的水床效应引起的 (b) እӑጇፒ
噪声放大现象。
图 1 自适应反馈有源噪声控制系统
为了克服前述离线设计方法的不足,同时考虑 Fig. 1 Block diagram of adaptive feedback ANC
噪声放大现象,本文研究了一种反馈有源控制系统 systems