
Page 52 - 201901
P. 52
48 2019 年 1 月
此处,f k = [0 e −j2πk/L · · · e −j2π(L−1)k/L T 中得到新的代价函数为
] 是离
散傅里叶变换矩阵的第 k 个列矢量。将式(11) 带入 sign(c k ) + 1
T
J = E[e (n)e(n)] + λ c k , (14)
2
式(10),并由|W(k)| = W(k)W (k)可得 2
∗
T
T
c k = w (f f )w − θ(k) 其中,0 < λ < 1是“惩罚因子”。
∗
k k
从式 (14) 可以看出,当 c k 6 0 时,也就是满足
T
= w F w − θ(k) < 0, (12)
式(12) 的约束条件时,符号函数 sign(c k ) = −1,“惩
T
T
因为 w F w = |W(k)| ,所以矩阵 F = f f 是一
2
∗
k k sign(c k ) + 1 c k = 0,式 (14) 与式 (9) 相同,此
个半正定阵。式 (12) 表明 c k 是 w 的二次型表达式, 罚项” 2
即式 (12) 是一个 “ 凸” 的约束条件,其中 c k 对 w 求 时以获取最大降噪量为目标;当c k > 0时,也就是不
偏导数可得 满足式 (12) 的约束条件时,符号函数 sign(c k ) = 1,
∂ T sign(c k ) + 1
∗
c k = 2F w = 2f f w = 2W(k)f . (13) “惩罚项” c k = c k ,此时要兼顾降噪量
∗
k
k
k
∂w 2
为了调节反馈系统中的噪声放大量并同时获 与噪声放大,在降噪量与噪声放大之间折衷。
得降噪量,本文提出在满足式 (12) 的约束下,最小 依据最速下降法可以求得式 (14) 决定的 w 的
化式 (9),为此将式 (12) 作为 “惩罚项” 添加到式 (9) 更新方式为
w(n) − µ IFFT{X (k)E(k)} + , 若 |W (k)| 6 θ(k),
∗ 2
w(n + 1) = (15)
w(n) − µ IFFT{X (k)E(k) + 4λLW (k)} + , 若 |W (k)| > θ(k),
∗ 2
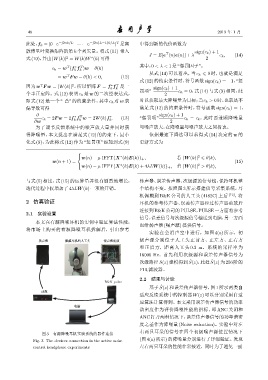
与式 (5) 相比,式 (15) 的运算量并没有剧烈地增长, 传声器、误差传声器、次级源的信号线,保持耳机整
迭代过程中仅增加了4λLW (k)一项的开销。 个结构不变。按照图 3 所示搭建信号采集系统,耳
机佩戴到 B&K 公司的人工头 (4182C) 上后 [12] ,将
2 仿真验证 耳机的参考传声器、误差传声器经过传声器前放后
连接到B&K公司的PULSE,PULSE一方面将参考
2.1 实验设置
信号,误差信号与次级源信号输送到电脑,另一方面
本文在有源降噪耳机的实例中验证算法性能,
也给扬声器(噪声源)提供信号。
将市场上购买的有源降噪耳机拆解后,引出参考
实验在全消声室中进行,如图 4(a) 所示,初
ੴܦ٨ ΄ਖ਼ᄊ̡ࢺ݀ ͜ܦ٨Ғஊ 级声源分别位于人工头正前方、正左方、正右方
和正后方,距离人工头 0.3 m。系统的采样率为
16000 Hz。首先利用次级源和误差传声器信号为
ˆ
ˆ
次级路径S(z)建模得到S(z),此处S(z)为256阶的
FIR滤波器。
2.2 结果与讨论
B&K pulse
ˆ
基于 S(z) 和误差传声器信号,图 1 所示两类自
Ҫஊ
适应反馈系统中的控制器 W(z) 可以分别采用自适
应算法计算得到。本文采用误差传声器信号的功率
ႃᑨ
谱密度作为评价降噪性能的指标,即 ANC 关闭和
ANC打开两种情况下,误差传声器信号的功率谱密
度之差作为降噪量 (Noise reduction)。实验中对左
右两只耳朵的信号在四个初级噪声源位置情况下
图 3 有源降噪耳机实验系统的器件连接
Fig. 3 The devices connection in the active noise (图4(a) 所示) 的降噪量分别进行了详细验证。发现
control headphone experiments 左右两只耳朵的性能非常接近,同时为了避免一副