
Page 51 - 201901
P. 51
第 38 卷 第 1 期 吴礼福等: 一种调节反馈有源噪声控制系统水床效应的频域自适应算法 47
的次级信号来合成。本文的算法完全适用于图 1 所 d↼n↽
x↼n↽ e↼n↽
示两种结构的反馈系统,因此,若无特别说明,后续 w S↼z↽ Ĥ
推导中不再明确区分。 w↼n↽
⌣
S↼z↽
反馈系统的水床效应是指一个频段内的噪声
x f↼n↽ ण
衰减通常伴随着另一频段内的噪声放大 [9−10] ,因
w↼n⇁↽
此,在反馈系统的离线设计中,将噪声放大量作为一 FFT FFT
Ĥ
个约束条件,通过最小化误差信号能量来求解控制
器 W(z)。从图 1 可以看出,在 z 变换域,Y (z) 与初 f µ
′
级噪声D(z)在误差传声器处相互抵消后有 ԩСᣂ δ႑ڂ౧
ᦊѬ
E(z) = D(z) + Y (z), (1)
′
Y (z)满足 IFFT
′
′
Y (z) = X(z)W(z)S(z) ≈ X (z)W(z), (2) f
′
X (k↽ E↼k↽
*
ˆ
其中,X (z)=X(z)S(z) 是用次级路径的估计 S(z)
′
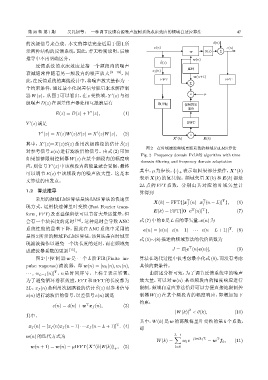
图 2 在时域滤波频域更新系数的频域 FxLMS 算法
对参考信号 x(n) 进行滤波后的信号。由式 (2) 可知
Fig. 2 Frequency domain FxLMS algorithm with time
如果能够限制控制器 W(z) 在某个频段内的幅度响
domain filtering and frequency domain adaptation
应,则信号 Y (z) 中该频段内的能量就会受限,最终
′
其中,µ 为步长,{·} + 表示取因果部分操作,X (k)
∗
可以调节 E(z) 中该频段内的噪声放大量。这是本
表示 X(k) 的复共轭。频域矢量 X(k) 和 E(k) 都是
文算法的出发点。
2L 点的 FFT 系数,分别由其对应的时域矢量计
1.2 算法推导 算得到
常用的频域 LMS算法是块 LMS 算法的快速实 T T T
X(k) = FFT{[x (n) x (n − L)] }, (6)
f
f
现方式,运用快速傅里叶变换 (Fast Fourier trans-
T
T
E(k) = FFT{[0 e (n)] }, (7)
form, FFT)及重叠保留法可以节省大量运算量,但
会有一个块长度的延时 [14] ,这种延时会导致 ANC 式(7)中的0是L点的零矢量,e(n)为
系统性能的显著下降,因此在 ANC 系统中采用的 e(n) = [e(n) e(n − 1) · · · e(n − L + 1)] . (8)
T
是图2 所示的频域FxLMS算法,该算法是在时域实
式(5)∼(8)描述的频域算法的代价函数为
现滤波操作以避免一个块长度的延时,而在频域完
T
成滤波器系数的更新 [15] 。 J = E[e (n)e(n)], (9)
图 2 中 控 制 器 w 是 一 个 L 阶 FIR(Finite im- 算法在迭代过程中仅考虑最小化式(9),而没有考虑
pulse response) 滤波器,即 w(n) = [w 0 (n), w 1 (n), 其他约束条件。
T
· · · , w L−1 (n)] ,n 是时间序号,上标 T 表示转置。 由前述分析可知,为了调节反馈系统中的噪声
为了避免循环卷积效应,FFT 和 IFFT 的长度都为 放大量,可以对 w(n) 某些频段内的幅度响应进行
ˆ
2L。x f (n)是利用次级路径的估计 S(z)对参考信号 限制,频域自适应算法恰好可以方便直接地限制控
x(n)进行滤波后的信号,误差信号e(n)满足 制器 W(z) 在某个频段内的幅度响应,即增加如下
约束:
T
e(n) = d(n) + w x f (n), (3)
2
|W(k)| < θ(k), (10)
其中,
其中,W(k) 是 w 的离散傅里叶变换的第 k 个系数,
T
x f (n) = [x f (n)x f (n − 1) · · · x f (n − L + 1)] . (4)
即
w(n)的迭代方式为 L−1
∑
T
W(k) = w l e −j2πlk/L = w f k , (11)
w(n + 1) = w(n) − µIFFT{X (k)E(k)} , (5) l=0
∗
+