
Page 34 - 应用声学2019年第4期
P. 34
494 2019 年 7 月
0 1.0 5.0
0.9
20 0.8 4.0
0.7
40 0.6 3.0
ງए/m 60 0.5 ࣨए/T10 -5 2.0
0.4
0.3
80 0.2 1.0
0.1
100 0
5 10 15 20 0.5 0.6 0.7 0.8 0.9 1.0
വগ ฉ
(a) ᮠဋ400 Hzᄊవढ़Ѧࣨए (b) ᮠဋ350 Hzᄊฉ៨
3.5 4.0
3.0 3.5
3.0
2.5
ࣨए/T10 -5 2.0 ࣨए/T10 -5 2.5
2.0
1.5
1.5
1.0
1.0
0.5 0.5
0 0
0.8 0.9 1.0 1.1 1.2 1.3 1.0 1.1 1.2 1.3 1.4 1.5
ฉ ฉ
(c) ᮠဋ400 Hzᄊฉ៨ (d) ᮠဋ450 Hzᄊฉ៨
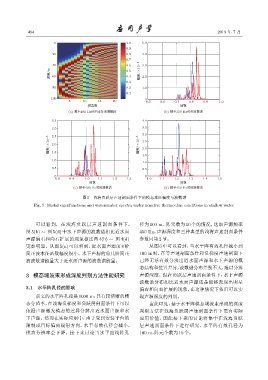
图 5 浅海负跃层声速剖面条件下的模态本征幅度与波数谱
Fig. 5 Modal eigenfunctions and wavenumber spectra under negative thermocline conditions in shallow water
可以看到,在浅海负跃层声速剖面条件下, 径为 100 m、阵元数为 10 个的情况,选取声源频率
图 5(b) ∼ 图 5(d) 中水下声源的波数谱相比近水面 450 Hz,声源深度和三种典型的浅海声速剖面条件
声源偏右和向右扩展的现象相比图 4(b) ∼ 图 4(d) 参数同第2节。
更加明显。从图 5(a) 可以看到,近水面声源前 8 阶 从图 6 中可以看到,当水平阵有效孔径减小到
简正波本征函数幅度很小。水下声源的前几阶简正 100 m 时,在等声速剖面条件和负梯度声速剖面下
波波数谱能量大于近水面声源的波数谱能量。 已经无法有效分辨出近水面声源和水下声源的模
态结构和位置差异,波数谱分布差别不大,难以分辨
3 模态域波束形成深度判别方法性能研究 声源深度。但在负跃层声速剖面条件下,水下声源
波数谱分布相比近水面声源还是能够表现出明显
3.1 水平阵孔径的影响 偏右和向右扩展的现象,在这种情况下依旧可以实
前文的水平阵孔径是1000 m,具有较清晰的模 现声源深度的判别。
态分辨率,在浅海负梯度和负跃层剖面条件下可以 由此可见,基于水平阵模态域波束形成的深度
依据声源激发模态的差异分辨出近水面声源和水 判别方法在浅海负跃层声速剖面条件下更有实际
下声源。然而在实际应用中,由于受到安装平台的 应用价值,因此接下来的讨论将集中在浅海负跃
限制或目标偏离端射方向,水平有效孔径会减小, 层声速剖面条件下进行研究,水平阵有效孔径为
模态分辨率会下降。接下来讨论当水平直线阵孔 100 m,阵元个数为10个。