
Page 8 - 《应用声学》2020年第4期
P. 8
494 2020 年 7 月
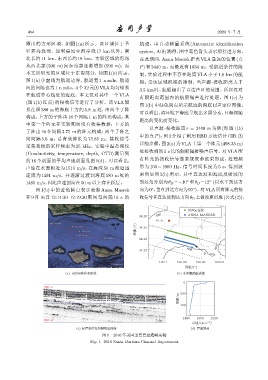
圈出的方形区域,如图 1(a) 所示。该区域位于圣 航迹,由自动测量系统 (Automatic identification
罗莎岛北部、加利福尼亚海岸线 17 km 以外,南 system, AIS) 测得,图中蓝色箭头表示船行进方向。
北长约 11 km、东西长约 18 km。实验区域的海深 在此期间,Anna Maersk 距离 VLA 最远的位置 (点
从西北部 (500 m) 向东南部逐渐增加 (590 m),而 P) 有 3440 m,而最近有 1634 m。受航道条件的限
本文所研究的区域位于东南部分,如图 1(b) 所示。 制,实验过程中不存在距离 VLA 小于 1.6 km 的航
图 1(b) 中虚线为航道边界,航道宽 1 n mile,航道 船;受该区域海深的限制,当声源 -接收距离大于
间的间隔也为 1 n mile。4 个32元的 VLA 均匀锚系 3.5 km 时,航船超出了直达声区的范围。所以仅对
在航道中心线处的海底。本文仅对其中一个 VLA
有限距离范围内的航船噪声进行处理。图 1(c) 为
(图 1(b) 红点) 的接收信号进行了分析。该 VLA 锚
图 1(b) 中绿色圆点所示航迹的海底回声定位图像。
系在深 580 m 的海底上方约 5.8 m 处,由两个子阵
可以看出,该环境下海底呈现出多层分布,且海深随
构成,上方的子阵由 16 个间隔 1 m 的阵元构成,其
距离的变化而变化。
中第一个阵元在实验期间没有收集数据;下方的
以声源 -接收距离 r = 3440 m 为例 (即图 1(b)
子阵由 16 个间隔 3.75 m 的阵元构成;两个子阵之
中的点 P),图 2 介绍了利用 RBD 方法估计 CIR 的
间间隔 5.6 m,总有效阵长为 75.85 m。接收信号
详细步骤。图2(a)为VLA上第一个阵元(498.35 m)
采集系统的采样频率为 25 kHz。实验中温盐深仪
(Conductivity, temperature, depth, CTD) 测量到 处接收到的 5 s 长的舰船辐射噪声信号。对VLA 所
的 16 个剖面的平均声速剖面见图 1(d)。可以看出, 有阵元的接收信号做常规宽带波束形成,处理频
声速在水面附近为 1510 m/s,在海深 50 m 附近迅 带为 150 ∼ 1000 Hz,信号时间长度为 5 s,得到波
速降为 1491 m/s,并逐渐过渡到海底 580 m 处的 束图如图 2(b) 所示,其中直达波和海底反射波的
◦
◦
1485 m/s,因此声速剖面在50 m以上存在跃层。 到达角分别为θ D =−10 和θ B =12 (以水平到达方
◦
◦
图 1(b) 中的蓝色圆点表示商船 Anna Maersk 向为0 ,垂直到达方向为90 )。对VLA所有阵元的接
在 9 月 16 日 12:14:30–12:19:30 期间每间隔 10 s 的 收信号在直达波到达方向θ D 上做波束形成(公式(2)),
ڀܦࠀͯ́
580
34.25 580 ANNA MAERSK
VLA
ጤए/(O) 34.24
34.23
600 600
34.22 600
600
P
120.1 120.08 120.06 120.04
ፃए/(O)
(a) வॎࠄᰎͻˊӝ۫ (b) ඵ᭧ᓍᓕᓈᤜڏ
0
580 m
ງए/m 200
400
1480 1500 1520
620 m
ܦᤴ/(mSs -1 )
(c) ڀܦࠀͯ́ਫ਼๒अڏϸ (d) ܦᤴҖ᭧
图 1 2016 年美国圣巴巴拉海峡实验
Fig. 1 2016 Santa Barbara Channel Experiment