
Page 11 - 《应用声学》2020年第4期
P. 11
第 39 卷 第 4 期 张雪冬等: 一种基于序贯估计的直达声区水面舰船被动测距方法 497
ഐဋ
3500 3500 3500 1.0
0.8
3000 3000 3000
ᡰሏ/m 2500 ᡰሏ/m 2500 ᡰሏ/m 2500 0.6
0.4
2000 2000 2000
0.2
1500 1500 1500 0
100 200 300 100 200 300 100 200 300
ᫎ൦᫂ ᫎ൦᫂ ᫎ൦᫂
(a) 1000 m (b) 1600 m (c) 3000 m
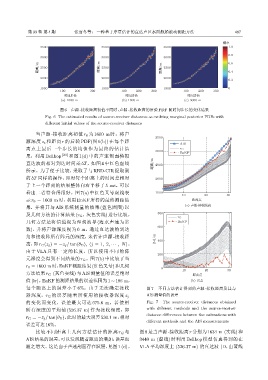
图 6 声源 -接收距离初值不同时,声源 -接收距离的后验 PDF 随时间步长的变化结果
Fig. 6 The estimated results of source-receiver distances as evolving marginal posterior PDFs with
different initial values of the source-receiver distances
当声源 -接收距离初值 r 0 为 1600 m 时,将声
3500
源深度 z s 和距离 r 的后验 PDF(图 6(b)) 在每个距
AIS
离点上最后一个步长的均值作为最终的估计结 r G
3000 EnKF
果,利用 Bellhop [23] 和图 1(d) 中的声速剖面模拟
直达波的相对到达时间差 δT,如图 4 中红色虚线 ᡰሏ/m 2500
所示。为了便于比较,采取了与 RBD-CIR 提取到
的 δT 同样的操作,即对每个距离上的时间差相对 2000
于上一个距离的结果整体向右平移了 5 ms。可以
看出二者符合得很好。图 7(a) 中红色叉号虚线表 1500
10 20 30
示 r 0 = 1600 m 时,利用 EnKF 所得的最终测距结 ᡰሏག
果,并将其与 AIS 系统测量的结果 (蓝色圆圈) 以 (a) ܦູ-ଌஆᡰሏ
及几何方法的计算结果 (r G ,灰色实线) 进行比较。 800
r G
几何方法是将信道视为理想波导 (海水声速为常 EnKF
600
数),并将声源深度视为 0 m,通过直达波的到达
角和接收阵所有阵元的深度,来估计声源 -接收距 |dr|/m
离,即 r G (z j ) = −z j / tan(θ D ), (j = 1, 2, · · · , N)。 400
由于 VLA 具有一定的长度,所以使用不同的阵
200
元深度会得到不同结果的 r G 。图 7(b) 中比较了当
r 0 = 1600 m时,EnKF测距结果(红色叉号)和几何
0 10 20 30
方法结果 r G (灰色实线) 与 AIS 测量值的误差绝对 ᡰሏག
值|δr|。EnKF的测距结果的误差范围为1 ∼ 186 m, (b) ឨࣀ
每个距离上的误差小于 6%。由于无法确定接收 图 7 不同方法估计得到的声源 -接收距离及其与
AIS 测量值的误差
器深度,r G 的误差随着所使用的接收器深度 z j
的变化而变化,误差最大可达 675.6 m。若使用 Fig. 7 The source-receiver distances obtained
所有深度的平均值 (526.37 m) 作为接收深度,即 with different methods and the source-receiver
distance differences between the estimations with
¯ r G = −¯z j / tan(θ D ),此时的最大误差 530.1 m,相对
different methods and the AIS measurements
误差可达16%。
比较不同距离上几何方法估计的距离 r G 与 图 8 是当声源 -接收距离 r 分别为 1634 m (实线) 和
AIS结果的误差,可以发现随着距离的增加,误差也 3440 m (虚线) 时利用 Bellhop 模型仿真得到的在
随之增大。这是由于声速剖面存在跃层,见图 1 (d)。 VLA 平均深度上 (526.37 m) 的直达波 (D,由蓝线