
Page 9 - 《应用声学》2020年第4期
P. 9
第 39 卷 第 4 期 张雪冬等: 一种基于序贯估计的直达声区水面舰船被动测距方法 495
4
-20
θ D
2 -10
ࣨए 0 ᝈए/(O) 0 θ B
-2 10
20
-4
0 1 2 3 4 5 -12 -10 -8 -6 -4 -2
ᫎ/s ᑟ᧚/dB
(a) ଌஆηՂ (b) ฉౌڏ
ᑟ᧚/dB
500 0
510 ኄʷࡏ๒अ
520 ᄊԦ࠱ฉ -10
ງए/m 530 -20
540
550 ᄰฉ ኄ̄ࡏ๒अ
ᄊԦ࠱ฉ -30
560
570
-40
0.98 0.99 1.00 1.01 1.02 1.03 1.04
ᫎ/s
(c) RBD-CIR
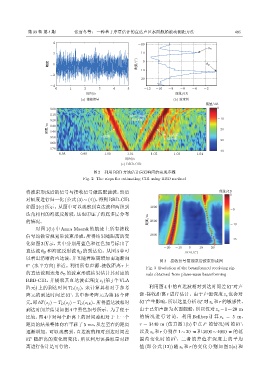
图 2 利用 RBD 方法估计信道响应的实现步骤
Fig. 2 The steps for estimating CIR using RBD method
将波束形成后的信号与接收信号做匹配滤波,然后 ᑟ᧚/dB
0
对幅度进行归一化 (公式 (3) ∼ (4)),得到 RBD-CIR
如图 2(c)所示。从图中可以观察到直达波和两组到 3000
-5
达角相同的海底反射波,这也印证了海底多层分布
的情况。 䐍/m 2500 -10
对图 1(b) 中 Anna Maersk 的航迹上所有接收
信号均做常规宽带波束形成,所得结果随距离的变 2000
-15
化如图 3 所示,其中分别用蓝色和红色加号标出了
-20 -10 0 10 20
直达波 θ D 和海底反射波 θ B 的到达角。从图 3 中可 DOA/(°)
以看出清晰的直达波,并且随着距离增加而逐渐向
图 3 接收信号常规宽带波束形成图
0 (水平方向) 靠近。利用所有声源 -接收距离 r 上
◦
Fig. 3 Evolution of the beamformed receiving sig-
的直达波到达角 θ D 的波束形成结果估计其对应的 nals obtained from plane-wave beamforming
RBD-CIR,并提取其直达波在深度 z j (第 j 个 VLA
阵元) 上的到达时间 T D (z j ),来计算其相对于参考 利用图 4 中的直达波相对到达时间差 δT 对声
阵元的到达时间差 δT,其中参考阵元为第 16 个阵 源 -接收距离 r 进行估计。由于声源深度 z s 也会对
元,即δT(z j ) = T D (z j ) − T D (z 16 )。所得直达波相对 δT 产生影响,所以这里分析 δT 对 z s 和 r 的敏感性。
到达时间差结果如图 4 中黑色加号所示。为了便于 由于已知声源为水面舰船,所以仅对 z s = 1 ∼ 20 m
比较,图 4 中对每个距离上的时间差相对于上一个 的情况进行讨论。利用 Bellhop 计算 z s = 5 m、
距离的结果整体向右平移了 5 ms,从左至右的距离 r = 3440 m (仿真图 1(b) 中点 P 的情况) 时的 δT,
逐渐增加。可以观察到,直达波的相对到达时间差 以及 z s 和 r 分别在 1 ∼ 20 m 和 3000 ∼ 4000 m 的范
ˆ
δT 随距离的变化而变化,所以利用该提取量对距 围内变化时的 δT,二者的差值在深度上的平均
离进行估计是可行的。 值 (即公式 (12)) 随 z s 和 r 的变化分别如图 5(a) 和