
Page 25 - 《应用声学》2020年第6期
P. 25
第 39 卷 第 6 期 李天宇等: 拖曳阵被动合成孔径目标深度稳健估计 819
做到精确测量环境信息,因此仿真的波数位置与实 了估计结果的稳健性,当测量的环境信息与真实环
际波数位置存在偏差。在实际应用中,需要在仿真 境偏差大时,这种稳健性的下降会带来严重的误差
得到的波数位置附近选取距离仿真波数距离较近 问题。从另一个角度来看,实际上通常对水下目标
的峰值进行匹配。另外,模态匹配时阶数选择是一 进行深度估计时,分辨率并不是最主要考虑的性能,
个需要考虑的问题,增加模态匹配的阶数,可以在一 因此实际应用中倾向于选择较少阶数的模态进行
定程度上提高目标深度估计分辨率,但同时也降低 匹配。
5 5
വগͥᝠፇ౧ വগͥᝠፇ౧
͌ᄾവগฉ ኄ3 ͌ᄾവগฉ
0 0 ኄ3
ኄ2 ኄ2
-5 -5
ࣨϙ/dB -10 ࣨϙ/dB -10
-15 -15
-20 -20
-25 -25
0.70 0.75 0.80 0.85 0.70 0.75 0.80 0.85
ฉ/m -1 ฉ/m -1
(a) ፃઈࣰᮕܫေ (b) ళፃઈࣰᮕܫေ
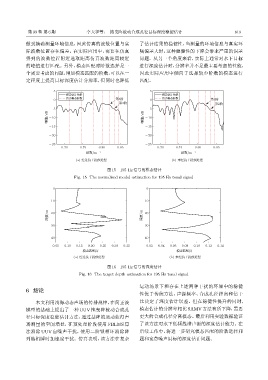
图 15 195 Hz 信号的模态估计
Fig. 15 The normalized modal estimation for 195 Hz tonal signal
0 0
10 10
ງए/m 20 ງए/m 20
30 30
40 40
0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.02 0.04 0.06 0.08 0.10 0.12 0.14
വগӜᦡए വগӜᦡए
(a) ፃઈࣰᮕܫေ (b) ళፃઈࣰᮕܫေ
图 16 195 Hz 信号的深度估计
Fig. 16 The target depth estimation for 195 Hz tonal signal
运动场景下和存在上述两种干扰的环境中的稳健
6 结论
性优于传统方法,声源频率、合成孔径距离和信干
本文利用浅海动态声场的传播规律,在简正波 比决定了深度估计误差。但在稳健性提升的同时,
模型的基础上提出了一种 UUV 拖曳阵被动合成孔 模态估计的分辨率相比 SAMV方法有所下降,需要
径目标深度稳健估计方法,通过基阵的运动获得声 更大的合成孔径分离模态。最后利用实验数据验证
场测量的空间增益,在预处理阶段使用 FBLMS 算 了该方法对水下低频线谱声源的深度估计能力。在
法消除 UUV 自噪声干扰,使用二阶锁相环消除阵 后续工作中,将进一步研究模态匹配的阶数选择问
列随机瞬时加速度干扰。仿真表明,该方法在复杂 题和宽带噪声目标的深度估计问题。