
Page 20 - 《应用声学》2020年第6期
P. 20
814 2020 年 11 月
间大于 0.2 s 时,信号相关性迅速减弱。综合考虑传 曳阵 ANC 应用中阵元数较多,并且滤波器长度较
播时延和自相关时间,滤波器长度应大于2000。 长,因此应尽量减小计算复杂度以减轻处理器压
1.0 力。本文选择频域分块最小均方 (Frequency block
ॆʷӑᒭᄱТѦ 0.5 0 元数据预处理算法。FBLMS 算法借助快速 Fourier
adaptive least mean square, FBLMS) 算法作为阵
变换 (Fast Fourier transformation, FFT)实现快速
-0.5
-1.0 -0.5 0 0.5 1.0 卷积和快速相关运算,并且可以通过对频域抽头权
ᒭᄱТᫎ τ/s 向量使用独立的归一化步长参数,显著提高算法的
图 1 自噪声自相关函数 收敛速度,有关 FBLMS 算法的更多内容可以参考
Fig. 1 Autocorrelation function of the self-noise 文献 [17],结合上文对滤波器长度的分析,本文的滤
在 ANC 应用中,通常在噪声源附近放置传感 波器参数选取为滤波器长度2048,块长度2048。
器采集参考信号,然而在水下应用中,额外放置水听 2.1 节中提出的声场积分法可以在阵列非匀速
器的方案会显著增加设备复杂性,因此考虑利用波 运动,但确知运动形式时获得测量数据的模态估
束形成方法直接从阵列接收信号中获取参考信号。 计,实际应用中,阵列接收信号还由于受到未知的
实验过程表明,拖曳阵在工作状态下近似平直且与 瞬时随机加速度扰动而产生相位抖动,需要采用针
UUV 在同一深度,因此可选择阵列指向 UUV 的方 对性预处理进行消除。二阶锁相环具有快速收敛
向计算各阵元时延,对阵元采集信号进行升采样后 的相位跟踪性能,在水下声通信中发挥着重要的作
反向时延叠加,再降采样得到自适应滤波器的参考 用 [18−19] 。在相位抖动抵消预处理中,首先对 PLL
信号。 的输出相位进行平滑,然后从输出相位中减去平滑
不同的自适应算法具有不同的计算复杂度和 后的相位可以得到相位抖动的估计,最后根据相位
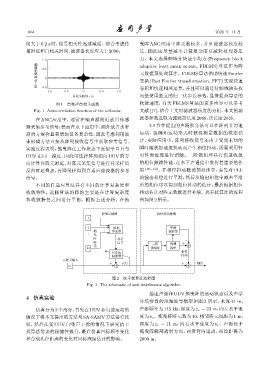
收敛特性,选择算法的目的主要是在计算复杂度 抖动估计对阵元数据进行补偿。抗干扰算法的流程
和收敛特性之间进行平衡。根据上述分析,在拖 图如图2所示。
ᒭ٪ܦખ๗ ᄱͯઇүખ๗
1
2 ฉౌ ࣱ
ફ Ā ॎੇ٨ ฉ٨
ఝ
Ā
ԠᏦ
ηՂ ̄ ೝ + -
Ћ
M ᩚᄱဗ ᄱͯ
ᒭᤠऄ ᄱͯ
ฉ٨ ઇү
mЋᣥК - -
+ e↼t↽ + ᣥѣ
m
图 2 抗干扰算法流程图
Fig. 2 The schematic of anti-interference algorithm
描述声源和 UUV 拖曳阵的运动状态以及声学
4 仿真实验
环境参数的浅海波导模型如图 3 所示,水深 44 m。
仿真分为3个部分,首先在UUV非匀速运动的 声源频率为 145 Hz,深度为 z s = 23 m,向左水平速
情况下将本文提出的方法与SA-SAMV方法进行比 度为 v s 。拖曳阵阵元数为 16,相邻阵元间距为 1 m,
较,然后在受 UUV 自噪声干扰的情况下研究抗干 深度为 z r = 11 m,向右水平速度为 v r 。声源处于
扰算法带来的稳健性提升,最后仿真目标频率变化 拖曳阵艉部端射方向,两者背向运动,初始距离为
和合成孔径距离的变化对目标深度估计的影响。 2000 m。