
Page 71 - 《应用声学》2021年第4期
P. 71
第 40 卷 第 4 期 周瑞峰等: 旋转超声磨削平行砂轮复合变幅器设计与试验 555
于市场上成熟的 28 kHz 超声发生器、换能器产品, 1.3 复合变幅器频率方程的建立与求解
设计旋转超声磨削平行砂轮复合变幅器。 1.3.1 复合变幅杆
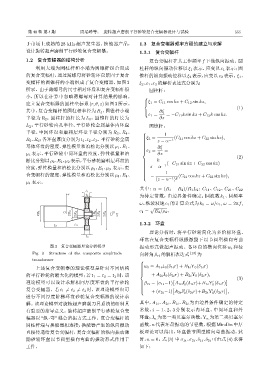
1.2 复合变幅器的结构分析 复合变幅杆在其工作频率 f 下做纵向振动。圆
利用大端为圆柱杆和小端为圆锥杆组合而成 柱杆的纵向振动位移以 ξ 1 表示,应变以 ε 1 表示;圆
的复合变幅杆,通过薄螺母将砂轮环盘紧固于复合 锥杆的纵向振动位移以ξ 2 表示,应变以ε 2 表示。ξ 1 、
变幅杆的圆锥杆的小端组成了复合变幅器,如图 3 ξ 2 、ε 1 、ε 2 的解析表达式分别为
所示。由于薄螺母的尺寸相对环盘和复合变幅杆很 圆柱杆:
小,所以在计算中忽略薄螺母对计算结果的影响。
建立复合变幅器的圆柱坐标系 (r, θ, z) 如图 3 所示。 ξ 1 = C 11 cos kz + C 12 sin kz,
(1)
其中,复合变幅杆的圆柱杆半径为 R 1 ,圆锥杆小端 ∂ξ
ε 1 = = −C 11 k sin kz + C 12 k cos kz.
半径为 R 2 ;圆柱杆的杆长为 L 1 ,圆锥杆的杆长为 ∂z
L 2 ;平行砂轮内孔半径、平行砂轮金属基体内环盘 圆锥杆:
半径、中间环盘和磨料层环盘半径分别为 R 3 、R 4 、
1
R 5 、R 6 ;各环盘厚度分别为t 1 、t 2 、t 3 。平行砂轮金属 ξ 2 = −1 (C 21 cos kz + C 22 sin kz),
z − α
基体环盘的密度、弹性模量和泊松比分别以ρ 1 、E 1 、 ∂ξ
ε 2 = =
µ 1 表示,平行砂轮中间环盘的密度、弹性模量和泊 ∂z
(2)
松比分别以ρ 2 、E 2 、µ 2 表示,平行砂轮磨料层环盘的 k
(−C 21 sin kz + C 22 cos kz)
−1
密度、弹性模量和泊松比分别以 ρ 3 、E 3 、µ 3 表示,复 z − α
1
合变幅杆的密度、弹性模量和泊松比分别以ρ 4 、E 4 、 (C 21 cos kz + C 22 sin kz),
−
(z − α −1 2
)
µ 4 表示。
其中:α = (R 1 − R 2 )/R 1 L 2 ;C 11 、C 12 、C 21 、C 22
t 1
r t 2 为待定常数,由边界条件确定;圆波数 k 1 、圆频率
ω、纵波波速 c 1 的计算公式为 k 1 = ω/c 1 , ω = 2πf,
√ E 4 /ρ 4 。
R 1 O R 2 R R R R 6 θ z c 1 =
1.3.2 环盘
L L 2
理论分析时,将平行砂轮简化为多阶梯环盘。
t 3
环盘在复合变幅杆纵振激励下以节圆型横向弯曲
图 3 复合变幅器理论分析模型 振动形式做超声振动。各环盘的横向位移 w i 和径
Fig. 3 Structure of the composite amplitude 向转角β ri 的解析表达式 [13] 为
transformer
上述复合变幅器的理论模型是针对不同结构 w i = A 1i J 0 (δ 1i r) + B 1i Y 0 (δ 1i r)
的平行砂轮的最大化的模型;若 t 1 = t 2 = t 3 时,该 + A 2i J 0 (δ 2i r) + B 2i Y 0 (δ 2i r),
(3)
[
理论模型可以设计求解相同厚度环盘的平行砂轮 β ri = (σ 1i −1) A 1i J (δ 1i r)+B 1i Y (δ 1i r) ]
′
′
0 0
复合变幅器。若 t 1 ̸= t 2 ̸= t 3 时,该理论模型也可 [ ′ ′ ]
+ (σ 2i −1) A 2i J (δ 2i r)+B 2i Y (δ 2i r) ,
0 0
进行不同厚度阶梯环盘砂轮复合变幅器的设计求
解。该理论模型对旋转超声磨削刀具系统的研制具 其中,A 1i 、A 2i 、B 1i 、B 2i 为由边界条件确定的待定
有重要的指导意义。旋转超声磨削平行砂轮复合变 常数,i = 1、2、3 分别表示内环盘、中间环盘和外
幅器以 “纵 -弯” 耦合谐振方式工作。复合变幅杆的 环盘;J n 为第一类贝塞尔函数,Y n 为第二类贝塞尔
圆柱杆端与换能器相连接,换能器产生的纵向振动 函数,n 代表环盘振动的节径数,根据 Mindlin 中厚
直接传递给复合变幅杆,复合变幅杆的纵向振动激 板理论可以得出,环盘做节圆型横向弯曲振动,此
励砂轮环盘以节圆型横向弯曲的振动形式作用于 时,n = 0。式(3) 中σ 1i 、σ 2i 、δ 1i 、δ 2i 可由式 (4)求得
工件。 如下: